

流れ 2009年4月号 目次
― 特集テーマ: 流体工学により解明される自然界,そこから生まれる新技術 ―
| リンク一覧にもどる | |
工学から視た海と流れ
|

1.はじめに
海洋を工学の立場から視ると色々な分野がある.人はこれまで海洋を,生物や鉱物の資源開発,石油やガスなどのエネルギー開発,物資輸送,海底ケーブルに見られる情報通信,海上空港などの海洋空間,軍事などで利用してきており,一方,海洋から人は高潮,津波,台風などの被害を受けており,また逆に上記の人間活動によって環境汚染をもたらし,またその被害者でもある.海と流れとの関係をみると,色々な成因によって,周期1分未満の風波による流れから,周期1500年以上といわれる深層大循環まで,幅広い周期を持った流れが混在している.これらの流れは,海洋における人間活動や地球環境に大きな影響を与えている.一方、海中には、ミクロンサイズの植物プランクトンからくじらのような大型水棲動物まで,生物の大きな食物連鎖が形成されており,数万種におよぶ動物たちの世界がある.かれらは何億年もの悠久の歴史を進化しながら生きぬいてきて,それぞれの環境のもとで色々な運動形態を持って生きている.この水棲動物の多様な運動形態や環境の変化に応じて自律的に行動する自律システムは海洋における流れと密接な関係を持って形成されている.
水棲動物の多様な運動形態や自律システムを工学の視点で視ることで,水棲動物の運動と推進に関わる生体外部流れと推進原理,水棲動物の運動機構と機能および行動形態を規範とした自律制御システムの解明を進めることができる.さらに,これらをもとに環境にやさしい水中移動機械についての研究開発が可能となる.
人間活動によって引き起こされる海洋の環境汚染では,赤潮が発生した閉鎖性海域では外洋からの流れによって海域が浄化される一方,開放性海域で発生した重油流出事故では海流によって被害が拡大する.一方で,海洋の流れからエネルギーを取り出す試みもなされている.
本章では,海と流れの関係の中で,工学の立場から,水棲動物の多様な運動形態や自律システムの解明とその応用技術,環境汚染事故による環境被害の最小化を目指した技術について,本研究室で行っている研究について紹介する.
2.水棲動物の多様な運動機構や自律システムの解明とその応用技術
水棲動物の運動機構とその応用技術
Lindsey[1]は推進器官として働く魚体の部位とその可動部の広さによって, 中央ひれ型、魚体尾ひれ型に分け,さらにそれぞれ屈曲型と振動型に分類した.さらに、Webb[2]は(a)推進器官(中央ひれ型,魚体尾ひれ型),(b)運動(場所維持,ホバリング,定常遊泳,迅速な出発巡航遊泳,全力遊泳),(c)筋線維(赤色,白色)で分析し,巡航型,加速度型,操縦型の三種類に分類した.このように,水棲動物の遊泳法は多くの種類があり,それぞれの生息域で環境に適応して生きている.
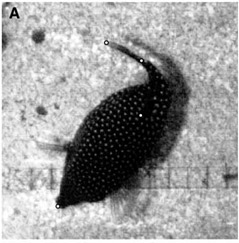
ここでは,ハコフグを例にして,その運動性能について述べる.ハコフグは、皮膚に骨板が発達し,全身を覆う硬い甲羅を持っている.この甲羅の横断面はほぼ四角形であり,全体は箱状となっている.体長は20cm~40cmほどで,尾ひれ,胸ひれ,背ひれ,尻ひれが付いている.ハコフグは全長のほとんどが“箱”のような胴体になっている.図1は観察に用いた長さ11.6 cm のクロハコフグの写真である.写真には白い○(マーカー)がついている.ビデオに撮影したクロハコフグの動きにあわせてこのマーカーも動く.このマーカーを追跡することで,クロハコフグの動きがわかるようになる.図2に,この観察の結果を示す.この図の中で,点で示されているのは旋回運動の中心であるが,この点が集まっていることから,クロハコフグがその場で止まって定位置で回転していることを意味している.
 |
 |
図1 クロハコフグ(文献[3]) |
図2 クロハコフグの動きの中心と胴体の移動(文献[3]) |
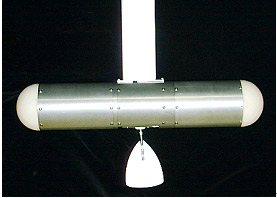
著者ら[4]はハコフグの運動性能で重要な役割を果たしている胸ひれの運動と流体力との関係を調べるため,胸ひれの前後運動,ひねり運動,上下運動を独立に作り出せる小型の胸ひれ運動装置“Birdfin”を開発した(図3).図3は,真上から撮った写真で,左側の胸ひれのみの運動を生成している.この装置の胴体の直径は0.1mで,長さは0.53mである.これまでの生物学的研究から,魚の胸ひれの動きは,上下運動を中心とした型(ここでは,揚力型と以下呼ぶ)と,前後運動を中心とした型(ここでは,抗力型と以下呼ぶ)に分かれる.揚力型のものは,胸ひれから発生する上下方向の揚力の前進方向成分を前進する力として用いている.これは,鳥の羽ばたきによる飛行と同じ原理だ.一方,抗力型の胸ひれの運動は,胸ひれを後ろにかいたとき(パワーストローク)に前後方向にほぼ鉛直にたてた胸ひれに加わる抗力を利用して前進する力を発生させている.
 |
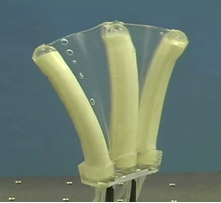 |
| 図3 三軸胸ひれ運動装置 “Birdfin” | 図4 空気圧アクチュエータひれ |
図3に示す胸ひれは剛体平板を用いたが,実際の魚の胸ひれと同じく柔軟ひれを模倣すべく,著者ら[5]は柔軟ひれを開発した(図4).人工筋肉として利用されている空気圧アクチュエータを用いた空気圧アクチュエータひれであり,他方は,シリコンゴムを用いた受動的変形ひれである.空気圧アクチュエータひれは3本のFMA(Flexible Micro Actuator)とその3本を覆うシリコン膜及び湾曲した水掻き部と翼根部から構成されている.鰭の根元部分からシリコンゴム製のチューブが出ており,FMAが有する空気室に繋がっている.チューブに圧搾空気を送り込むことにより屈曲・伸展運動を発生させる.
著者らは図3の”birdfin”を用いて,推進効率の面から揚力型が抗力型より優れていること,また抗力型では前後運動と回転運動に上下運動を加えることで推進効率や推力が大きくなることを示した.また最大の推力を発生させる揚力型と抗力型の運動の最適化を行い,一様流中では揚力型が抗力型より適しており,静止流中ではその逆であることを示した.
一方,著者ら[6]は計算流体力学の手法を用いて”birdfin”まわりの非定常流れや流体力の計算を行った.前後運動,回転運動,上下運動からなる抗力型の胸ひれ運動を用いて,計算と実験の比較を行った.時間変動する流体力や一周期の平均的な流体力が実験とよく一致することを示した.
著者ら[7]は胸ひれ運動装置”Birdfin”を胴体の前部と後部の位置の左右に合計4つ取り付けた水中ロボット”Platypus”を開発した(図5). ロボットの名前はオーストラリアの河川や池沼に生息し,短い四肢で遊泳する“カモノハシ”に因んで付けた.魚の胸ひれは左右一対のみであるが,運動の自由度を増やすため,胴体の前部と後部の位置の左右に4つの胸ひれ装置を取り付けている.全長1.36mで,胴体の直径0.12 m ,質量 14.5 kg である.円筒状のフロートが浮力調整用に付けてある.この水中ロボットは,前進,後進,その場旋回,その場上昇・下降,その場水平横移動など,停止状態で細かな操縦が可能であることを確認した.外乱の中で,ホバリング状態を中心とした姿勢・誘導制御性能を調べることを目的として,港湾における構造物の脚柱の検査を想定して,潮流中において円柱まわりに水中ロボットの機首を円柱表面に向けて,なるべく一定距離を保ちながら,移動させる実験を行った.図6に,実験結果を示す.この実験では,胸ひれ運動は揚力型を用いた.上流側から潮流に流されながら,円柱表面と一定距離を保つように移動し,その後,いったん円柱から大きく離れて,出発点に戻り,また潮流に流されながら,円柱表面に沿って移動する方法を採用した.その結果,潮流中においても,円柱まわりの誘導制御が可能であることを示した.
 |
 |
| 図5 胸ひれ運動装置付き水中ロボット”Platypus” | 図6 潮流中での円柱まわりの誘導制御 |
2.2 水棲動物の自律システムとその応用技術
Wiltschkoら[8]は昆虫から脊椎動物まで色々な動物の行動に対する地球磁場の影響を議論している.そこでは,地球を長距離移動する鳥や魚,カメなどは,自分の位置を知るために地磁気を手がかりの一つとしていることを,明らかにしている.Cainら[9]はウミガメやロブスターが目標地に対する相対位置を求めるために地磁気マップを得ることを議論している.ウミガメは誕生後数年間,何千キロも海洋を回遊する.この回遊の際に何らかの方法で自分の位置を特定しなければ海流などに流されて本来の生息域を離れてしまい命を落とす危険があるが,ウミガメが生息域を出ることはほぼない.Lohmannら[10]は,ウミガメに地磁気を感知する能力があり,この地磁気情報を利用して定位していることを明らかにしている.
現在,陸上ではカーナビゲーションに代表されるようにGPSなどを使って自分の位置を瞬時に把握することができる.一方水中ではGPSの電波が届かないため,AUV(自律型水中艇)のナビゲーションは主にINS(慣性航法装置)を用いて行われる.しかしINSは時間と共に定位誤差が増大するため何らかの方法で位置を補正する必要がある.これまで,音響トランスポンダ,ドップラー流速計,同時自己位置地図獲得手法を用いて位置補正を加えるという方法が主に用いられている.しかし、音響トランスポンダの場合は海底に多数設置する必要があり,中深度・長距離航行の際には,海底近くで使われるドップラー流速計や同時自己位置地図獲得手法では計測が困難になる.
著者らは,海底勾配が小さい播磨灘において地磁気と水深の計測を行い,海域の地磁気マップと水深マップを作成し,一方,すでにデータのある海底勾配が急な駿河湾も対象海域にして,INSとの組み合わせ,潮流,海底勾配の影響の観点から,シミュレーションによって地磁気マップと水深マップを用いたAUVのナビゲーションの手法の検討を行った.その結果,潮流がある場合は,INSと地磁気マップと水深マップの組み合わせよりも,地磁気マップと水深マップだけを用いたほうが,定位精度が高いこと,海底勾配の定位精度への影響が大きいことなどを明らかにした[11].
3. 環境汚染事故による環境被害の最小化を目指した技術
1997年1月2日のロシアのタンカー「ナホトカ号」の重油流出事故では,6240klの重油が流出し,福井県をはじめ,日本海沿岸の8府県におよぶ海岸に漂着し,環境および人間活動に大きな打撃を与えた.しかし,その後も1999年にはフランスのエリカ号が沈没(重油11000t),2000年にはシンガポールでタンカー座礁(原油7000t),2002年にはスペインのプレスティージ号沈没(燃料油10000t以上),2007年には,韓国泰安タンカー事故(原油12547kl)と事故が起き続けている.流出した重油は,波により水と混ざり,エマルジョン化(乳化した状態をいう)して高粘度になるため,沿岸に漂着すると自然環境に大きなダメージを与える.残存性が高いため,その回復には多大な時間と人手が必要であり,自然環境や地域経済への影響・損失は計り知れない.当研究室では,浮流重油の沿岸への漂着を防止し,環境被害を最小限に食い止めるために,浮流重油の漂流位置,海象条件および浮流重油に関するリアルタイムデータを供給することを特徴とした浮流重油自動追従ブイシステムの開発[12,13]と浮流重油漂流シミュレーションの開発を行っている[14].
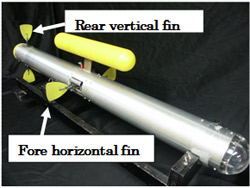
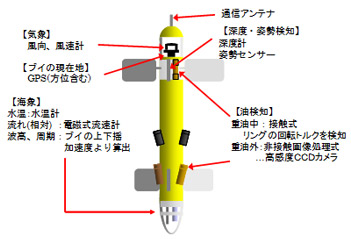
浮流重油自動追従ブイは,油の流出直後から投入され長期間にわたってリアルタイムデータを供給することが求められる.従って浮流重油を自動追従するためにかかるエネルギーをなるべく低く抑える必要がある.海面上にてプロペラを用いた水平方向移動を行う場合,移動時には常に作動させている必要がある.また推進機構としてプロペラを用いた場合,高粘度の重油の影響によりプロペラが故障して正常に作動せず,追従を行えなくなる可能性がある.そこで本研究では浮力と翼角の制御により,水平方向への移動を行う方法を採用している.ブイが波・風等の外乱により重油中から外れた場合,接触式センサーによりブイ周囲に重油が無いことが検知され,ブイは重油の追従制御モードへと移行する.追従制御モードでは,先ず浮力調整装置により浮力を低減させ潜航を開始する.一定の水深に達した後,非接触式センサーにより,ブイ上方の油塊浮流位置及びその領域の検知を行う.そして浮力増加及びフィンによる浮上方向制御を行い油塊の検知された方向へと浮上を開始する.浮上後,接触式センサーによりブイ周囲の重油の有無を検知し,ブイが油塊の中に納まるまでこの潜航・浮上による自動追従は繰り返される.また,ブイが重油中にある場合,現在位置及び周囲の気象,海象データをリアルタイムで基地局へと供給する.本体には気象・海象を計測するためのセンサ類を搭載して,海表面近くの風向・風速,水温,流速,波高を計測し,これをGPSデータとあわせてブイの監視システムとしての地上局へ通信回線により発信することができる.水槽試験、海域試験を通して、ブイで取得した海象・気象データは重油の漂流の監視にとって,有用なデータであること,潮流中においても本体に組み込んだ位置推定プログラムによって,非接触式センサを用いて水面に浮かばせた擬似油位置を補足し,その位置への誘導が可能であることを明らかにした.
 |
 |
| 図7 浮流重油自動追従ブイの機器類搭載配置 | 図8 浮流重油自動追従ブイ |
前述の浮流重油自動追従ブイは,地上局にリアルタイムでブイ周辺の重油の位置や気象・海象のデータを送信するので,これらのデータを重油漂流予測シミュレーションに取り入れることによって,その漂流予測の精度を向上させることが考えられる.これまで気象モデルと海洋モデルを結合したモデルを用いてナホトカ号重油流出事故後の重油漂流シミュレーションを実施し,日本海沿岸への重油の漂着データと比較し,その有効性を確認している.
4.おわりに
第2章「水棲動物の多様な運動機構や自律システムの解明とその応用技術」で述べた内容は,エアロ・アクアバイオメカニズム研究会が扱っている研究対象の一部であり,これ以外に色々な研究がなされている.興味をお持ちの読者はURL http://abmech.org/ を参照されたい.
第3章「環境汚染事故による環境被害の最小化を目指した技術」で述べたものは,船舶の構造.操船,運航管理などを含んだリスク管理の一部ではあるが,これまで開発がなされてこなかった.今後,さらに実用化に向けた取り組みが必要である.
参考文献