

流れ 2014年11月号 目次
― 特集テーマ:2014年度年次大会 (1) ―
| リンク一覧にもどる | |
タービンブレードの空力性能改善に向けた剥離流れ検出技術の課題
瀬川 武彦
|


1. はじめに
2014年9月8日から9月10日まで東京電機大学東京千住キャンパスで開催された2014年度年次大会において,流体工学部門企画「EFDワークショップ:流れ場計測の誤差,不確かさ評価,ノイズ対策」において本稿に関連する内容を発表させていただいた.この度,執筆の機会を与えてくださった流体工学部門広報の横山博史先生をはじめ,EFDワークショップを企画された先生方に御礼を申し上げるとともに,講演発表内容を以下に紹介する.
マイクロマシン技術(MEMS)や計測制御システムの発達により,1990年代後半から世界中の研究グループにより様々な流体制御素子(アクチュエータ)を用いた流れの能動制御に関する研究開発が活発に行われてきた(1).産業技術総合研究所では1999年から2005年にまで,科学技術振興調整費・開放的融合研究推進制度「乱流制御による新機能熱流体システムの創出」プロジェクト(http://www.nmri.go.jp/turbulence/,研究統括責任者:大橋秀雄先生)において、東京大学の笠木伸英先生(現JST上席フェロー)のご指導のもと,壁乱流や翼周り剥離流れのフィードバック制御の研究を行ってきた.当時,流体制御アクチュエータとして積層型圧電セラミックス,シンセティックジェット,電歪ポリマーなどを利用し,また,MEMS施設を利用したシリコンプロセスにより,せん断応力や剥離流れ検出用の多様なセンサの独自開発も行った.一方,上記プロジェクトに限らず,国内外で行われてきた実験的研究の多くは風洞施設において実施されており,流体制御デバイスの流体機械への実装に向けては,アクチュエータ及びセンサの重量や耐久性,さらにはノイズ対策など,解決すべき様々な技術課題が残された.
本稿では,プラズマアクチュエータ(2)(3)を用いた翼周り剥離流れのフィードバック制御システムを風車などのターボ機械に適用するために必要な剥離流れ検出技術を中心に解説する.近年,誘電体バリア放電をプラズマアクチュエータ(Dielectric Barrier Discharge Plasma Actuators, DBD-PAs)は,航空機,ガスタービン,高速列車,大型風車といった流体機械のエネルギー効率や騒音低減効果を飛躍的に向上させることができる次世代流体制御素子として期待されている.プラズマアクチュエータについては国内でも日本機械学会や日本流体力学会を中心にレビューされているため,それらを参照されたい(4)(5)(6).従来型のプラズマアクチュエータは可動部がなく,軽量であることが流体機械への実装に向けた最大の利点であるが,2次元表面への装着は容易である反面,3次元形状のタービンブレードを有するターボ機械の表面に凹凸なく設置することは困難である.そこで,著者らは図1(b)に示すように絶縁材と埋め込み電極を兼用した絶縁被覆ワイヤを用い,金属筐体もしくは金属テープなどの補助電極を露出電極とする「ひも型プラズマアクチュエータ(String-type DBD-PAs)を開発した(7).次節以降,図1(c)に示すひも型プラズマアクチュエータを用いた剥離流れフィードバック制御に向けたセンサ技術及び関連技術について解説する.
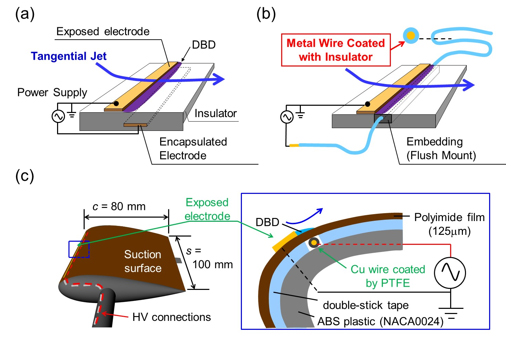
Fig.1 Schematic illustrations of DBD-PAs. (a) Conventional sheet-type DBD-PA, (b) sting-type DBD-PA embedded in insulation layer, (c) string-type DBD-PA embedded in dielectric sheet lapped around NACA0024.
2. FBGセンサを用いた剥離流れリアルタイム検出
本研究を開始する以前は, MEMS技術を用いて作成した片持ち梁式の流れ方向検出センサを用いて剥離流れの検出を行ってきた(8).片持ち梁構造はシリコンウェハをエッチングすることで造形され,さらに片持ち梁構造とシリコンウェハの境界近傍にホウ素をドープすることで歪ゲージを形成し,片持ち梁根元近傍の歪みを検出する.片持ち梁は20 µm程度の薄さであるため流れの中では流れ方向に僅かに変形するが,変形する方向の違いで出力電圧の符号が反転する.よって,剥離流れによって生じる逆流が発生した場合に負の電圧を出力するように翼負圧面の後縁近傍に設置し,負電圧が得られている場合にのみアクチュエータを作動させるフォードバック制御が可能であることが示された.しかし,出力電圧のドリフトや電磁ノイズの影響といったブリッジ回路特有の問題が生じ,符号判定による流れ方向の検出が長時間行えないため,実用化の目途は立っていない.
さらに,プラズマアクチュエータと併用して剥離流れを検出するには,電磁ノイズや温度変化に対応できるセンサを選択することが重要である.そこで,著者らはMEMSセンサと同時に開発してきたfiber Bragg grating(FBG)センサを用いた剥離流れ検出手法を開発してきた(8).図2にFBGセンサの基本構造と歪み計測の概略を示す.一般的な通信用光ファイバ(外径:125 µm,アクリルコート含む外径:250 µm)のファイバコア(直径:5~10 µm)に対し,局所的に屈折率が異なるグレーティング構造(グレーティング間隔:Λ,グレーティング数:約2000個/cm)を施し,1本の光ファイバに異なるn個のグレーティング間隔(Λ1,Λ2,…,Λn)を持つセンサ部を形成する.ファイバコアに通信波長帯(例えば1,550nmから1,600nm)のブロードバンドレーザーを導入した場合,各センサ部からはBragg波長(λB(n) = 2n0Λn)が反射されるが,各FBGセンサの伸縮が外部からの応力や温度変化に対して線形に伸縮するため, λB(n)の変化量から外部応力や周辺温度を同時多点計測できる.FBGセンサは電磁ノイズの影響を殆ど受けないが,周辺温度の影響を受けるため,温度モニタリング用のFBGセンサを歪み計測部近傍に装着し,温度補正を行う必要がある.また,FBGセンサを用いた流れ計測技術の開発当初は,MEMSセンサと同様に翼負圧面の後縁近傍に設置し逆流検出を試みたが,周辺温度の変化とは別にプラズマアクチュエータによって前縁近傍で加熱された空気がセンサ近傍を通過することで流れ方向の検出を困難にすることが明らかになり,その対策技術が必要となっていた.
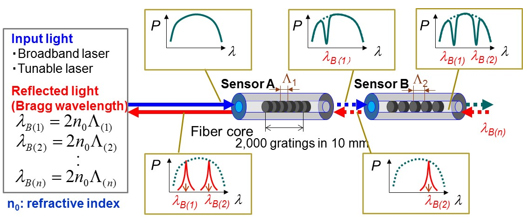
Fig.2 Structures of fiber Bragg grating (FBG) sensor.
この問題を解決するため,図3(a)に示す可動壁を有する吹出し型風洞試験部に翼弦長 80 mmのNACA0024を迎角12oに固定し,低Reynolds数流れ(Re = 5.3×104)において可動壁を振動させることで翼前縁近傍から周期的に発生する剥離流れの検出を試みる.プラズマアクチュエータ(図1(c))は前縁近傍に設置されており,負圧面に沿って誘起ジェットが導入されるため,1組の片持ち梁構造及びFBGセンサを図3(b)に示すように熱の影響を受け難い正圧面側に設置する.また,剥離流れはNACA0024の負圧面側で生じるため,正圧面中央部から後縁に延びる片持ち梁は,後縁から更に5 mm程度下流側に突き出す構造となっている.これは,剥離流れが生じた場合,先端部が振動することで根元近傍の歪みが変化することを期待して設計されている.
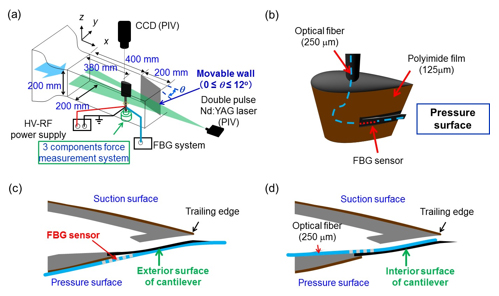
Fig.3 (a) Wind tunnel with movable wall, (b) FBG sensor attached on pressure surface of NACA0024, (c) FBG sensor attached on exterior surface, and (d) on interior surface.
本稿では,正圧面側の流れが通過する片持ち梁の外側表面(図3(c))と,流れが直接通過しない内側表面(図3(d))の2条件について,FBGセンサのグレーティング部から反射されるλBの時間変化を解析した結果を示す.図4(a)及び(b)は外部表面で計測されるプラズマアクチュエータ非稼働時のλBと移動平均から求めた標準偏差(λB’)の時間変化であり,可動壁の振動と同期してλBとλB’が周期的に変化していることがわかる.同条件下における空間速度分布をPIV解析した結果,λBの変動幅が大きく,λB’ ≥ 0.006の条件でNACA0024から剥離流れが生じていることが確認されている.図4(c) 及び(d)はプラズマアクチュエータ稼働時に外部表面のFBGセンサで計測されるλBとλB’の時間変化である.非稼働時と比較して変動が低減し,λB’ ≥ 0.006の出現頻度も減少する.一方, λBが時間経過とともに増加する傾向があり,FBGセンサを正圧面に設置する場合でも,誘電体バリア放電による流体の加熱を対策する必要がある.
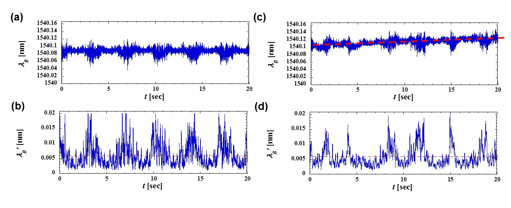
Fig.4 Bragg wavelength shift and their standard deviations detected by FBG sensor attached on exterior surface (Fig. 3(c)) under periodic wall oscillation. (a), (b) Without flow control, (c), (d) with feedback control.
そこで,FBGセンサを片持ち梁根元近傍の内側表面(図3(d))に設置した結果,図5に示すように外部表面の場合と比較して片持ち梁の歪みが減少し,PIV解析から λB’ ≥ 0.003で剥離流れが生じていることが確認されている.フィードバック制御を行うためにプラズマアクチュエータを稼働させた場合でも,図5(c)に示すように図4(c)で見られるような時間とともにλBが増加することはなく,剥離流れの出現頻度も減少している.よって,本手法によりプラズマによる熱の影響を低減することが可能であり,剥離流れの検出精度が向上することが明らかになった.
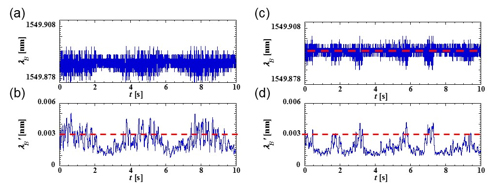
Fig.5 Bragg wavelength shift and their standard deviations detected by FBG sensor attached on interior surface (Fig. 3(d)) under periodic wall oscillation. (a), (b) Without flow control, (c), (d) with feedback control.
3. タービンブレードにおける剥離流れ検出・制御に関連する技術課題
これまで行ってきた風洞実験における剥離流れの検出や制御では,電気的な配線や翼型への光ファイバの導入が容易であるが,ターボ機械への適用に向けては,静止場では想定されない新たな手法の導入が必要である.図6は現在進行中のプロジェクトの概要を示しており,1kW風車に剥離流れフィードバック制御システムを組み込み,制御効果を発電量で評価するための要素技術を開発している.
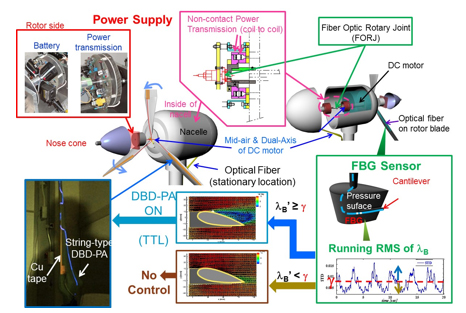
Fig.6 Overview of wind turbine project on feedback control of flow separation by using DBD plasma actuator and FBG sensor.
ローター直径1.8 mのタービンブレードは3次元形状であるため,ひも型プラズマアクチュエータを装着する予定である.アクチュエータに電力供給を行うため,ローター先端部(Nose cone)に搭載可能なバッテリ式及び非接触電力伝送式の高周波高電圧電源の開発を行っている.バッテリ式は軽量のリチウムイオン電池をFETでスイッチングし,トランスを介して高周波高電圧を発生させることができるが,プラズマアクチュエータの長時間駆動を行うために電池容量を増加させると重量が増加し,軽量化するために電池を小型化すると容量が減少し,電池の交換頻度が増す欠点がある.一方,非接触式は,ローター部に大容量コンデンサを取り付けて一時的なバッテリ(DC電源)を形成することで軽量化し,コンデンサへのチャージは静止場から非接触送電を行う方式である.軽量かつバッテリ交換が不要であるため,将来的な実用化に向けて有望な方式である.本プロジェクトでは,発電用モータの回転軸を両軸かつ中空加工し,タービンブレードの反対側の軸にコイルがセットされたフェライトコアを微小間隔で対向させて設置し,静止側から回転側に非接触電力伝送を行うための技術を開発している.
一方,FBGセンサを用いた剥離流れ検出を行うためには,タービンブレード上に設置されている光ファイバへのブロードバンドレーザー(もしくはチューナブルレーザー)の入射やFBGセンサから反射されるBragg波長の検出を行う必要ある.大型ターボ機械にこれらの検出装置を登載する場合には,ローター部に設置するスペースがあるが,小型ターボ機械への登載は困難である.そこで静止部から回転部に光信号を低損失で送受信できる光ファイバローリジョイント(Fiber Optic Rotary Joint,FORJ)の開発を行っている.FORJでは,図7 に例示するように静止部と回転部の間の光ファイバが切断されており,微小空間距離(Gap),端面反射(Reflection),ファイバ同士の軸ずれ(Misalignment),などにより光伝達損失が生じ,結果としてFBGセンサから得られる剥離流れの情報が劣化する恐れがある.また,FORJが回転することで,回転角の違いによりそれらの損失が時間的に変化することが懸念材料である.そこで光伝達損失を低減させるため,向かい合う光ファイバ端面の両面に反射防止膜(ARコート)を施したFORJと,端面の一方のみ(片端)を傾斜研磨したFORJの性能を比較した.図8は回転体に設置したFBGセンサから反射されるBragg波長ピーク(図2の反射スペクトラム概念図におけるλBのピーク)のPowerの回転角依存性を示しており,ARコートされたFORJでは,回転によりPowerが大きく変動する(図8(a)).実際には,片持ち梁に設置するFBGセンサからの剥離流れ情報はBragg波長ピークのPowerではなく,Bragg波長そのものが判定できればよい.しかし,回転中にPowerが大きく変動すると,Bragg波長ピークがノイズレベまで低下してピーク検出が不安定になり,剥離流れの情報が劣化する. 一方,片端を傾斜研磨したFORJでは,ARと比較して回転角の違いによる変動幅が低減する(図8(b)).よって,タービンブレードにおける剥離流れの検出には,傾斜研磨したFORJを中心に開発を進める必要がある.
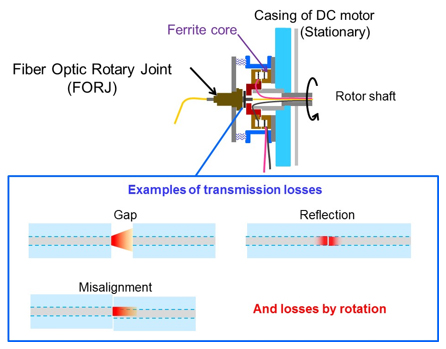
Fig.7 Examples of losses between end faces of optical fibers in FORJ.
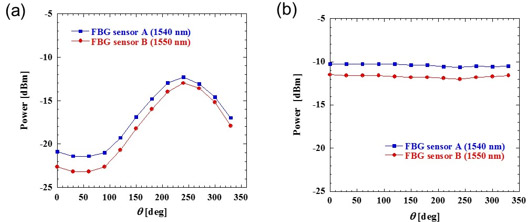
Fig.8 Reflected power from FBG sensor attached on rotor. (a) FORJ with
AR coated end faces, (b) FORJ with flat and angled end faces.
4. おわりに
本研究では,ターボ機械に実装可能な空力改善技術の実現に向けて,プラズマアクチュエータとFBGセンサを用いた剥離流れフィードバック制御システムの構築を試みた.プラズマアクチュエータは機械的可動部がなく軽量であるために注目を集めているが,3次元形状のタービンブレードへの装着だけなく,耐久性や電源の問題を解決する必要がある.また,流れの検出・制御技術については,ターボ機械の作動環境で安定して機能し,静止場・ローター間の電力や情報の伝達を高精度で行う技術が要求されるため,各要素技術の更なる高度化を行っていく予定である.
謝辞
本研究は,新エネルギー・産業技術総合開発機構(NEDO)平成23年度先導的産業技術創出事業「能動流体制御技術を用いたバーチャルブレード構築による風力発電システムの飛躍的な始動性及び設備利用率向上に向けた研究開発(11B04022c)」により行われた.また,剥離流れ検出技術の開発は,平成22年度日本学術振興会外国人特別研究員(欧米短期)のDr. Timothy Jukes(現Dyson Ltd.),NTTアドバンストテクノロジ(株)及び(株)雄島試作研究所の協力のもとに行われた.ここに深く感謝の意を表します.
文 献
| (1) | Gad-el-Hak, M., Flow Control: Passive, Active and Reactive Flow Management, Cambridge University Press, London (2000). |
| (2) | Roth, J. R., Sherman, D. M., and Wilkinson, S. P., “Boundary Layer Flow Control with a One Atmosphere Uniform Glow Discharge”, Proceedings of 36th AIAA Aerospace Sciences Meeting and Exhibit, AIAA 98-0328 (1998). |
| (3) | Corke, T. C., Enloe, C. L., Wilkinson, S. P., “Dielectric Barrier Discharge Plasma Actuator for Flow Control”, Annual Review of Fluid Mechanics, Vol. 42 (2010), pp. 505-529. |
| (4) | 藤井孝藏, 松野隆, “DBDプラズマアクチュエータ -バリア放電を利用した新しい流体制御技術”, 日本機械学会流体工学部門ニュースレター「流れ」, 大気圧プラズマ流, I:低温プラズマ流, 2007 年 12 月号. |
| (5) | 深潟康二, “プラズマアクチュエータの基礎と最新動向”, ながれ, Vol. 29 (2010), pp. 243-250. |
| (6) | 松野隆, “プラズマアクチュエータを用いた剥離制御”, 日本機械学会誌, 特集:ここまで来た 流れの制御, Vol. 115, No. 1197 (2012), pp.692-696. |
| (7) | 瀬川武彦, Timothy Jukes, 湯木泰親, “ひも型プラズマアクチュエータ誘起噴流の流動特性”, ながれ, Vol. 31(2012), pp. 479-482. |
| (8) | Segawa, T., Pang, J., Ikehara, T., Maeda, R., Yoshida, H., “MEMS-Based Cantilever Sensor for Fluid Dynamics Measurements”, MEMS and Related Material Technologies, Research Signpost, (2010), pp. 217-243. |