

Control of aerodynamic noise with feedback loop around the trailing edge of a curved plate with a kink shape by a plasma actuator
 |
| Takenori MIYAMOTO, Hiroshi YOKOYAMA, Akiyoshi IIDA Toyohashi University of Technology |
Abstract
Intense sound is radiated due to aeroacoustic feedback loop from a flow around the trailing edge of a curved plate with a kink shape such as a bonnet of an automobile. For the reduction of this noise, the control by a plasma actuator (PA) was investigated. The aim of this investigation is to clarify the effects of flow control by the PA on noise reduction and the noise reduction mechanism. To do this, wind tunnel experiments with a half-scale bonnet model and direct numerical simulations of flow and sound fields were performed. The investigation of the effects of the position for the installation of the PA on the control presents that the control at the position close to the flow separation point around the kink is effective for the noise reduction. Also, the control effects were compared between co-flow and counter-flow configurations regarding the direction of the mean induced flow by the actuator to the freestream. The tonal sound was almost completely reduced by the control with both configurations. The distributions of coherent output power of velocity fluctuations with the tonal sound were also found to be reduced around the kink shape. This supports the predicted results of the suppression of the two-dimensional vortices contributing to the acoustic radiation around the re-attachment point by the control. Consequently, the control can lead to the suppression of the feedback loop of the radiating mechanism of tonal sound. These results were a part of the paper published in Transactions of the JSME (in Japanese), Vol.84, No.861 (2018).
Keywords
Aeroacoustics, Noise control, Feedback noise, Trailing edge noise, Automobile, Plasma actuator
Figures
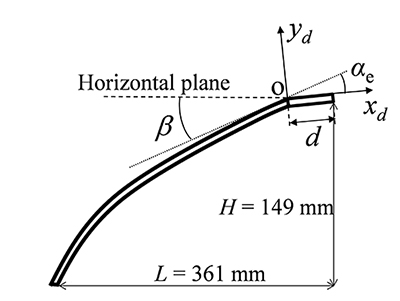
Fig.1 Configurations of flow around a curved plate with a kink shape. The distance from kink to trailing edge was set to be constant of d = 30 mm.
 |
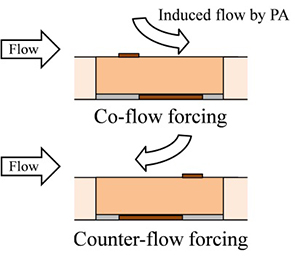 |
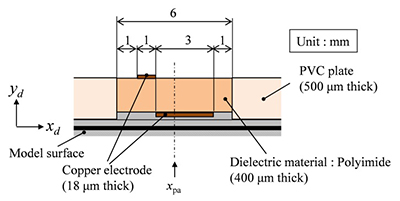
Fig.2 Configurations of the present plasma actuator. In this research, the streamwise middle position of the plasma actuator, xpa, is changed. The actuator is set between polyvinyl chloride (PVC) plates to be flush-mounted. Right figure shows the arrangement of plasma actuator with co-flow and counter-flow configurations.
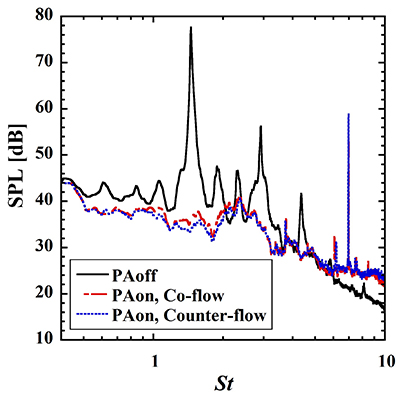
Fig. 3 Measured sound pressure spectra with and without control at Uref = 30 m/αe = 9.5º, where the control was performed by the plasma actuator with co-flow and counter-flow configurations at xpa/d = 0.1 with Epa = 5.5 kVp-p. This figure shows that the tonal sound at the fundamental frequency of St = 1.4 was reduced to the floor level by the control with both configurations.
|
|
(a) Baseline (St = 1.4) |
|
|
|
(b) Controlled with co-flow configuration (St = 2.3) |
(c) Controlled with counter-flow configuration (St = 2.3) |
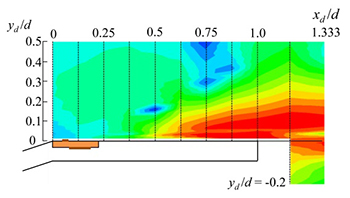
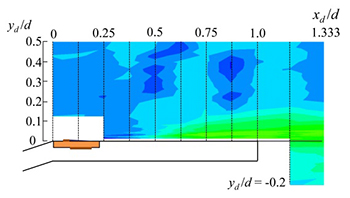
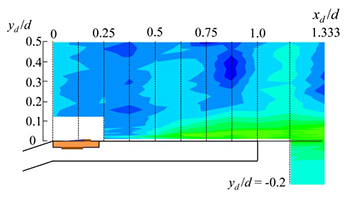
Fig. 4 Measured distributions of coherent output power at Uref = 30 m/s for αe = 9.5º at fundamental frequency with and without control, where the control is performed by the actuator at xpa/d = 0.1 with Epa = 5.5 kVp-p. (a) The distributions for baseline flow at St = 1.4 are shown. (b) The distributions for controlled flow by the actuator with co-flow configuration at St = 2.3 are shown. (c) The distribution for controlled flow by the actuator with counter-flow configuration at St = 2.3 are shown. These results show that the velocity fluctuations related with the tonal sound is weakened by the control.