

流れ 2003年12月号 目次
― 特集:動力飛行百周年 ―
| リンク一覧にもどる | |
鳥のような飛行を目指して
― 航空新100年へ向けた空力弾性の新たな挑戦 ―
 福井大学工学部機械工学科 松下 洸
|
1.はじめに
100年前にライト兄弟が動力付きの安定で持続的な有人飛行に成功したのには飛行の安定・操縦上重要な工夫があった.鳥のように主翼を撓(たわ)ませる操縦方法である.その後の航空技術の進歩はこの空気力と構造復元力による連成から生ずる空力弾性の諸問題を回避するために飛行機の構造は固く作られる方向に進んできた.航空史新100年に踏み出す時に当たって今,再度鳥のような飛行を目指そうという気運が生まれている.空力弾性関連技術の進歩によって可能となってきた最近のこの動きを紹介する.
2.ライト兄弟の知恵―主翼のたわみによる操縦
1903年12月17日にアメリカ,ノースカロライナ州キティーフォークの平原でライト兄弟が人類史上初めてフライヤーと名付けた複葉機で4回の飛行に成功したが,その成功に導いた重要な工夫が,風にあおられた時に飛行機の姿勢を立て直す機構にあった.初飛行を担当した弟オービルは主翼中央部に設けた操縦籠(図1)に腹ばいになり,尻を左右にずらすことで飛行機の横操縦を行った.今のハンググライダ―の操縦に似ていた.操縦籠はワイヤーで垂直尾翼とともに主翼翼端につながっていて,操縦によって主翼翼端が引かれ主翼がそり曲げられた.これをワープと呼ぶ(図2)[2].この主翼のワープによって空気の圧力分布が変り,飛行機の横揺れモーメントが得られた.垂直尾翼も同時に取られていわゆる協調旋回ができた.これはまさに鳥の操縦に近い.鳥は筋肉でつばさの反りを変えて自分の飛ぶ向きを自在に操っている.さらには風の変化によって生ずるつばさの反りを神経で感じて風によるあおられを立て直している.
ライト兄弟後の航空技術の進歩は,速度,高度,航続距離などの性能向上を目指して,機体材料が木骨・羽布張りから金属製に変り,姿勢制御は補助翼と垂直尾翼の操舵に取って代わって主翼そり曲げ方式は姿を消した.
図1 フライヤーの操縦席(中央が操縦籠) [1]
図2 フライヤーの主翼ワープ(正面から見た図) [2]
3.空力弾性諸問題の対策
空気力による主翼の撓みから生ずる各種の空力弾性問題は飛行機設計者にとって常に悩みの種であった.補助翼を下向きに取って主翼の揚力を増そうとすると,同時に生ずる頭下げモーメントで主翼が捩(ねじ)り下がってしまって揚力が増えない舵の逆効きの問題,迎え角が増すと揚力とともに捩り上げの空気力モーメントが生じて迎え角がさらに増して捩れが止め処なく増大してしまうダイバージェンス現象,さらにこれが振動的に現れるフラッタなどである.長年の経験と研究から得られた通常の対策は,主翼を捩りにくくするように翼の付け根部分を補強する,翼の前後方向の重心が捩りの中心(弾性軸)より前方に来るようにして曲げモードと捩りモードの連成フラッタを起きにくくする,舵面が関係するフラッタではヒンジ周りの質量バランスを取るために付加質量を取り付けるなどである.
これらの方法はいずれも機体の構造重量を増す対策であるので飛行機の性能を制限してしまう.1970年代頃から米国で始まった研究は,これらの構造上の対策に代って自動制御で特にフラッタを抑止しようというものであった.従来の対策が受動的であるのに対して能動的な対策であるとしてアクティブ制御という用語が生まれた2).空力弾性現象として同類の,乱気流に遭遇した飛行機が舵面をアクティブに操縦して変動応力を軽減する突風荷重軽減技術は今では実用段階に達し,最近のコンピュータ制御による操縦システムを取り入れている航空機にはその機能が組み込まれている.強制振動現象である突風荷重ではシステム自体は安定であるが,フラッタは自励振動であってシステムが不安定であるから制御装置が故障すると直ちに空中分解に至る.あらゆる飛行状態での空力弾性現象の理解がシステム設計の前提として必要である.空力弾性現象を構成する構造振動と非定常空気力のうち構造振動については既に解析手法は完成している.非定常空気力については,亜音速及び超音速領域ついては読者ご存知の通り数値流体力学技術は完成の域に達している.唯一,衝撃波が翼面上に発生し変動する遷音速領域について,衝撃剥離問題のために解析精度は未だ十分ではなく,遷音速で生ずるフラッタの代表的な非線形現象であるリミット・サイクル振動の振幅を精度良く予測するまでには至っていない.
このような研究現状の中で,遷音速フラッタのアクティブ制御については数学モデルにモデル誤差が生ずることを前提とした制御系の設計手法であるロバスト制御手法を取り入れる研究が専ら実施されている.この方面での研究は今後,遷音速フラッタの数値解析精度向上の研究とロバスト制御系設計の研究とが相まって進められてゆくことになる.
4.アクティブ・空力弾性翼プロジェクト
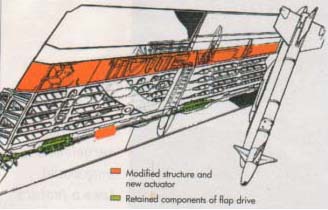
米国のNASA,米軍研究所,ボーイング社が共同で意欲的な研究プロジェクトを実施した[4].アクティブ空力弾性翼(AAW)プロジェクトと名付けたこのプロジェクトは,従来は回避すべきものとしていた翼の弾性変形を逆に積極的に活用する技術を開発しようというものである.前述のように,翼の撓みなど弾性変形を避けようとすると機体の重量は増加するので飛行機の性能は損なわれる.アクティブ制御技術は構造重量の増加によらずに制御技術で問題を解決しようという試みであって,前縁・後縁舵面を駆動して生ずる翼面の圧力分布の変動を利用するが,それを一歩進めて,舵面駆動で生ずる翼自体の弾性変形を積極的に利用しようというのである.図3はプロジェクトで使用したF/A-18戦闘機で,図4に改造した左翼を示す.オレンジ色で示した部分が新たに改造した後縁部分(図の上方)と前縁舵面のアクチュエータ(下方,舵面ヒンジ上)である.新設のアクチュエータによって前縁舵面と後縁舵面は独立に操舵できるようになっている.
このAAW技術によれば空力効率の良い高アスペクト比翼(翼幅の長い翼)が実現できてその結果,重量軽減効果が13%と見積もっている.

図3 AAWプロジェクトで使用したF/A-18 [5]
(9/2002, p. 36)
図4 アクティブ空力弾性翼の操縦系統[5]
5.鳥のような飛行を目指すモーフィング技術
AAWプロジェクトでは相変わらず舵面を利用しているが,従来の舵面アクチュエータを利用している限り翼を薄くするには制限がある.ここ十数年来研究が進められてきたスマート構造をこのワープ技術に採用することが考えられる.従来型のアクチュエータによって翼をワープすることに留まらず,翼構造にピエゾセラミックス,形状記憶合金,磁歪材料などを使用して材料自体にセンサーとアクチュエータ機能を持たせて直接翼構造の形状を変える.これは正に形態的(morphological)にも鳥に近づいてくる.このモーフィング(morphing)技術が今年から始まる航空技術200年目へ向けての空力弾性の新たな挑戦である.このモーフィング飛行機の実現に向けて,遷音速領域でのリミット・サイクル振動を中心とする非線形特性のより一層の理解の促進[6],ロバスト制御設計手法の確立と併せてスマート構造によるフラッタ制御システムに関する研究開発の一層の強化が必要である.
参考文献
[1] 米国立航空宇宙博物館ホームページ:http://www.nasm.si.edu/
[2]Pendleton, Ed., Sanders, B., Flick, P., and Sensburg, O., “Controllable Aeroelastic Lifting Systems,” Proceedings of the International Forum on Aeroelasticity and Structural Dynamics 2002, (2002), pp. 555-566.
[3] 松下 洸,「飛行機の振動モードのアクティブ制御」,日本機械学会誌,89, 811, (1987), pp. 662 - 667.
[4]Pendleton, E., Bessette, D., Field, P., Miller, G., and Griffin, K., “Active Aeroelastic Wing Flight Research Program: Technical Program & Model Analytical Development,” Journal of Aircraft, 37, 4, (2000), pp. 554 - 561.
[5] Wilson, J. R., ”Active Aeroelastic Wing: A New/Old Twist on Flight,” Aerospace America, 40, 9, (2002), pp. 34 - 37.
[6] Matsushita, H., Miyata, T., Kawai, M., and Mosekilde, E., “Nonlinear Mathematical Modeling of Aircraft Wing Flutter in Transonic Range,” Proceedings of International Conference Physics and Control, 1, (2003), pp. 195 - 199.