

流れ 2021年3月号 目次
― 特集テーマ:流体工学部門講演会 3月号 ―
| リンク一覧にもどる | |
小型無人飛行機の飛行シミュレーションゲーム
 |
 |
 |
| 磯田 佳孝 京都工芸繊維大学 |
定永 拓馬 京都工芸繊維大学 |
河野 真音 京都工芸繊維大学 |
1. はじめに
私たちはチーム名「MeasLab」として第18回流れの夢コンテストに参加し,光栄にも最優秀賞を頂きました.今回はコロナウイルスのため初のオンライン発表・実演となりました.このような事態の中,コンテストを運営してくださった実行委員の方々に御礼を申し上げるとともに,作品内容について紹介させていただきます.
2. コンセプト
今回のコンテストテーマは「流れで遊ぼう」でした.これを受けて作品のコンセプトを「小型無人飛行機のシミュレーションゲーム」に決定し,作品タイトルをコンセプトの英訳である「Flight simulation game of micro air vehicle (MAV)」から単語の頭文字をとって「Sim MAV」としました.このコンセプトは私たちの研究内容から着想を得ています.私たちは実験的手法で低Reynolds数における翼周り流れを研究しており,この知見を小型無人飛行機 (Shibata et al., 2018)や魚型の自律型無人潜水機(Isoda et al., 2020)に応用することを目標にしています.得られた実験データをロボットの機動にどのように役立てるかという視点で研究を行っているので,実際に知見を活用してロボットを制御したいと思うようになりました.そこで,卓上サイズの小型風洞を用いて低Reynolds数における翼周り流れを再現し,得られた実験データをリアルタイムに処理してMAVの飛行をシミュレートするゲームを作ろうと考えました.
3. 作品について
ここでは,まずゲームの内容を紹介し,つぎに装置の仕組みや設計の意図,及びポイントを説明します.
3・1 飛行シミュレーションゲームの内容
Fig. 1にゲームの内容を示します.図の左側にあるのが製作した装置であり,卓上サイズの小型風洞,供試翼,ディスプレイから構成されています.ユーザはコントローラを用いて翼の迎角を操作できるようになっており翼周り流れを制御します.翼には圧力センサが内蔵されており,その出力に基づいてシミュレーションを行い,飛行高度をリアルタイムでディスプレイに表示します.加えてディスプレイには,青と赤のゲートが並べられており,ゲートを通過すると色に応じたポイントを獲得できます.ユーザはこのゲートを正確に通過するように飛行高度をコントロールすることが求められ,合計得点を競うゲームとなっています.
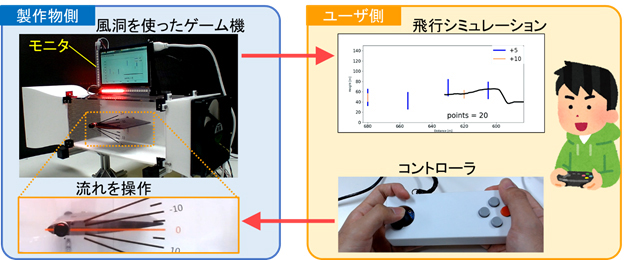
Fig. 1 飛行シミュレーションゲームの内容
3・2 詳細設計
Fig. 2に装置全体と風洞の主要パーツを示します.ゲームを快適に操作するには装置を安定させる必要があります.そこで単に風を送るのではなく,流れを安定化させる機構が搭載された風洞を作製しました.風洞の種類は小型化できることからエッフェル型の吸い込み式を採用し,構成要素は縮流部,観測部,PCケースファンです.縮流部はFig. 2(b)に示すように複雑な形状をしており,この形状を再現するために3Dプリンタを導入しました.寸法の上限はプリンタの出力サイズから決まり,形状を決定するパラメータは論文(Bell and Mehta,1988)を参考にして決めました.縮流部の詳細な寸法が決まると,自動的に他のパーツの寸法も決まります.観測部の側面は視認性があり,加工が容易なアクリル板で作製しており,入口と出口には流れを整流するハニカムと流れを発生させるPCケースファンを設置しています.
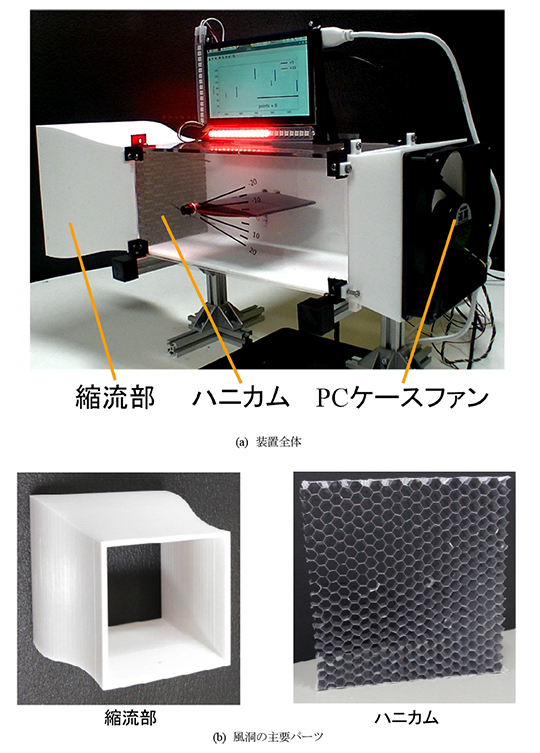
Fig. 2 装置全体と風洞パーツ
Fig. 3に風洞の観測部周辺と圧力計測を担っている翼の内部構造を示します.観測部周辺には飛行高度,得点,主流速度,翼の迎角などのゲームをプレイする際に必要となる情報が集約されています.Fig. 3(a)のように観測部上面にはディスプレイが設置されており,MAVの飛行経路と通過することで得点が入るゲートが表示されます.このディスプレイの左側には得点を可視化するための青色LEDを列状に取り付けています.ディスプレイにも得点は表示されるのですが,今回はオンラインでの実演であることを考慮して,LEDを用いてカメラ越しでも視覚的に伝わるように工夫しました.また,ディスプレイの下部にも赤色LEDを設置しており,これは主流速度の大きさを可視化します.これも同様に,オンライン上ではファンや風の音から風速を感じ取ることが困難であるため,聴覚ではなく視覚的に伝わるように工夫しています.
観測部にはMAVの主翼を模したNACA 0012翼を設置しています.翼はシャフトを通してサーボモータに接続されており,ユーザはコントローラを用いて翼の迎角を操作できるようになっています.Fig. 3(b)に示すように翼は上面と下面に分解できるようになっており,その中に2つの圧力センサを内蔵しています.翼表面に空いた穴から圧力を計測する仕組みになっていますが,翼と回転軸の締結部や上面と下面の嵌合の隙間が空いていると,圧力が抜けるため正しく計測できないという問題がありました.そこで防水テープで嵌合の隙間を覆うなどをして修正したところ風速に応じたセンサ出力が得られるようになりました.
つぎに飛行シミュレーションやハードウェアの制御を担うソフトウェアについて説明します.まずシミュレーションには小型PCのRaspberry Piを用いており,Pythonで記述されたプログラムが実装されています.プログラムの動作において,初めに翼に内蔵された圧力センサから値を読み込み,そこから翼上下面の圧力差と揚力を計算します.つぎにプログラム内で定義された重力定数と揚力を比較して飛行高度を格納した変数を変化させます.最後にこの飛行高度を縦軸に,横軸には水平方向の移動距離をとり,結果を逐次PythonのMatplotlibライブラリのグラフ機能を用いてディスプレイに出力します.一方,得点を示すLED,迎角調整のサーボモータ,風洞のファンなどのハードウェアには,それらの制御を得意とするマイコン(Arduino)を使用しており,C++と組み込み関数を用いてプログラムが記述されています.
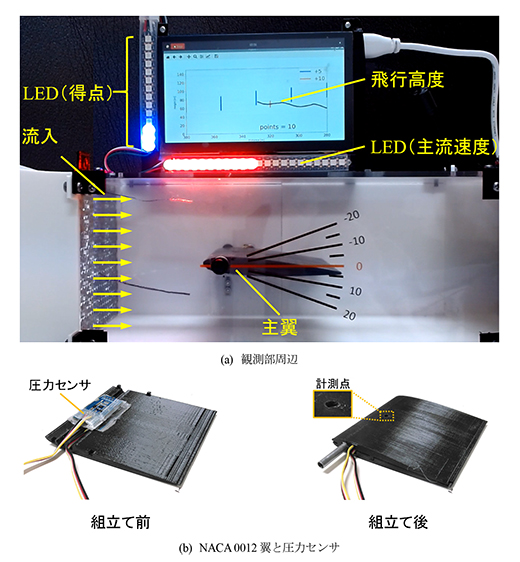
Fig. 3 観測部周辺と圧力計測の方法
4. オンライン発表・実演に向けて
今回は初のオンライン開催であるため,オンラインならではの課題がありました.従来の対面による実演であれば,シミュレーションゲームを実際にプレイしていただくことが可能ですが,今回はオンライン開催のため,装置のアピールポイントを直接伝えることができないという課題がありました.実演における限られた時間の中で審査員にアピールポイントを伝えるには,質疑のやりとりの回数を増やすことが重要であると考えました.そこで,Fig. 4のように装置周辺に機材を配置するとともに質問の役割分担を行いました.装置周辺には全体と細部を映すwebカメラ(CAM2~CAM4)が配置されており,質問に合わせてPCに接続するカメラをスイッチャーで切り替えられるようになっています.また,質問内容はプレゼン資料からハードとソフトに至るまで様々であることが予想されるため,Fig. 4の右側のようにモレなく,ダブりなく役割を決めることで,質問に的確に対応できるようにしました.
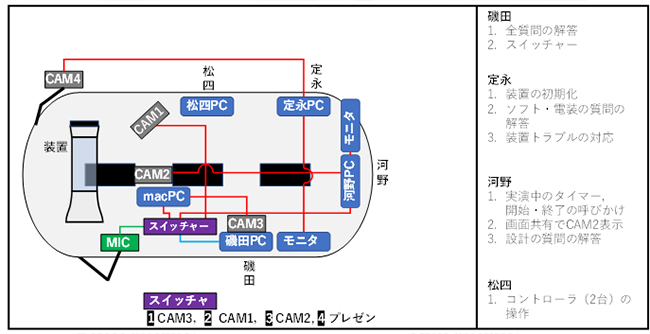
Fig. 4 オンライン実演における機材配置と役割分担
5. まとめ
今回のテーマである「流れで遊ぼう」を達成すること,及び自身の研究に関係する作品を作ることを目的としMAVの飛行シミュレーションゲームを作製しました.このゲームを操作することで,自身の研究に新たな着想が得られると考えています.
6. 謝 辞
流れの夢コンテスト参加にあたり,多くの方々からご支援を頂きました.特にチームメンバの定永拓馬さんと河野真音さんにはハード・ソフトともに高い完成度で仕上げていただいたことが最優秀賞の受賞に最も貢献したと考えています.リハーサルやデザインレビューを行う際には指導教員である田中洋介先生をはじめとする研究室の学生方,研究室外の学生方に参加いただき,多角的な視点でアドバイスを頂きました.作品の実演において,松四大樹さんにはゲームの操作係をして頂きました.協力していただいた皆様に深く感謝申し上げます.