

流れ 2019年12月号 目次
― 特集テーマ:2019年度年次大会 ―
| リンク一覧にもどる | |
気泡の流体工学的諸特性とその計測技術
齋藤 隆之
静岡大学名誉教授
1. 緒 言
本記事は,2019年度日本機械学会年会(2019年9月8日~11日,秋田大学)における筆者の基調講演(流体工学部門)を計測技術の視点から要約したものである.講演時には時間の制約から気泡に関わる計測技術をかなり省いたため,流体工学部門ニュースレターという機会を戴いたことに,関係各位に心から感謝申し上げる.
気泡や気泡群を含む流動で気泡と液相の両方を同時に計測するには,計測原理が大きく異なる場計測と局所計測とを組み合わせる必要がある.前者の代表例には可視化,後者には電気抵抗プローブや光ファイバープローブが挙げられる.気泡流への応用の基礎として,単一気泡の物質移動,気泡周囲の液相運動,気泡界面運動,気泡サイズと形状,気泡の重心運動を計測する技術に関して,場計測ではLIF(Laser Induced Fluorescence )を,局所計測では光ファイバープローブを,主に筆者の経験と知見を基に取りまとめたい.
2. LIFによる物質移動の可視化計測
LIFと気泡後流の3次元化
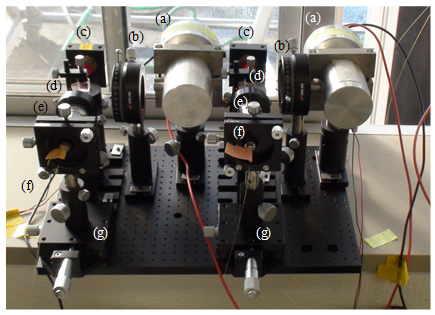
二酸化炭素気泡(以下CO2気泡)は気泡内のCO2が周囲の水へ溶けながら上昇するので,その後流の一部はCO2とH2Oとの化学反応により酸性化する.例えば,HPTS(8-Hydroxypyrene-1, 3, 6-Trisulfonic Acid, Trisodium Sal)はレーザー光を照射した際の蛍光強度がpH変化に鋭敏かつ極短時間に変化するので(Coppeta and Rogers, 1998),CO2の溶解プロセスを可視化できる(Huang and Saito, 2017).ただし,CO2気泡は上昇とともにその径を減少させるので,単一CO2気泡とその周囲液相の運動を定量的にまた統計的に意味あるものとするには,気泡の初期径,初期姿勢などを厳密に制御して,多数回(少なくとも数十回)実験を行う必要があった.注射針とFig. 1に示す単一気泡発生装置(以下BLD.Saito and Toriu, 2015)を用いると,初期気泡径,初期気泡姿勢,気泡上昇軌道,気泡上昇中の気泡形状と姿勢などが極めて高い再現性の下で,LIFとPIVとを組み合わせた可視化実験が可能となった.加えて,単一CO2気泡の実験を行う前に,単一空気気泡を用いた実験を十分に行って,気泡の重心運動と界面運動,周囲の液相運動を把握しておく必要があった(Saito et.al, 2010).なお,このBLDは3章の光ファイバープローブの実験結果と光線追跡シミュレーション結果との複合解析にも使用した.
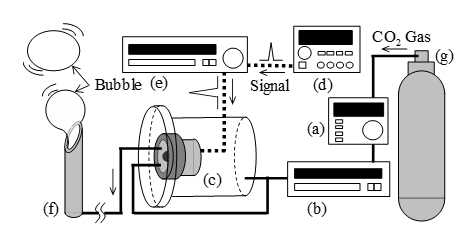
(a) Primary pressure controller, (b) Secondary pressure controller, (c) Audio speaker, (d) Function generator, (e) Amplifier, (f) Hypodermic needle, (g) Gas cylinder
Fig. 1 Single bubble launch device.
打ち出し直後はジグザグ運動するサイズの単一CO2気泡後流のLIF可視化画像をFig. 2に例示する.ジグザグ軌道平面で変向点前後を捉えたものである.気泡下部におけるpH分布を光電光ファイバープローブ(Hanyu and Saito, 2010)で実測し,LIFの減光度(可視化における暗い部分)とCO2濃度分布との関係を予め把握しておいて,可視化画像の二値化処理における閾値を決めた.
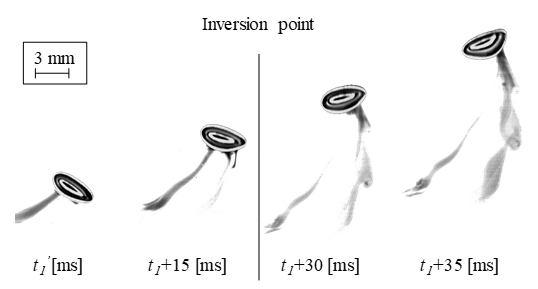
Fig. 2 Typical LIF results of a single CO2 bubble.
ジグザグ運動する気泡の後流の3次元構造をLIF画像から再構築するには,直交する2方向から励起レーザーシートをインチングと停止(あるいは,BLDの注射針をインチングと停止)を繰り返して,後流をレーザーシートでスライスして撮影した.同一気泡で撮ることは困難なので,極めて再現性の高いBLDを用いた.Fig. 3はこうして撮影したLIF可視化画像の一例である.後流の瞬時3次元構造を構築することはできないが,平均的な3次元構造を再構築することはできた.Fig. 4は,このようにして捉えた気泡後流の一部である.
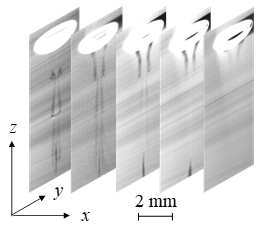
Fig. 3 Series equidistant cross-section images of bubble wakes from y-z plane.
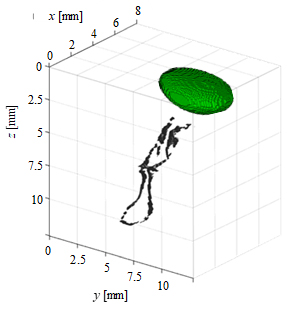
Fig. 4 Construction of the 3D bubble wakes.
3. 光ファイバープローブによる気泡計測と溶液濃度計測
3・1 計測システムの構成と計測原理
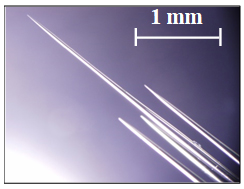
光ファイバー素線はコア(光の導波路),クラッド(コアを環状に覆う反射層)と外被膜(クラッドの保護膜)から成っており,外被膜を剥いだ光ファイバー素線をプローブ(Fig. 5参照)に使用した.電気抵抗プローブと同様,基本的には光ファイバープローブの検出端を覆う相を検出するプローブである(Abuaf et al., 1978; Catelia, 1992).Abuafの当時に比べて格段に研究が進展し,単一光ファイバープローブでも気泡数密度,気泡径,気泡速度,プローブ通過位置などを同時に計測できるし(Mizushima et al., 2013),球や回転楕円体に近い気泡であれば,形状を計測できる可能性も高い.加えて,通過位置を検出できることから,気泡をプローブで串刺しにする前に気泡数密度,気泡径,気泡速度を計測することは単一プローブでも可能である.
計測システムの代表例をFig. 6に示す.レーザーダイオード(a)のレーザー光(直線偏光)をハーフミラー(b)と対物レンズ(c)を介して光ファイバープローブ(d)の光電変換器側端面に集光した.入射レーザー光は同プローブ内をコアとクラッドとの境界面で全反射を繰返して,入射レーザー光の一部が計測端面に到達する.コアの屈折率と計測端面を覆う相の屈折の差に応じて,計測端面で反射されて同プローブ内に戻るレーザー光(戻り光)と同プローブから外部に照射されるレーザー光との割合が決まる.計測端面を覆う相が水の場合にはコアと水との屈折率差が小さいため,戻り光量が小さく,空気の場合にはこの屈折率差が大きいため,戻り光量が大きくなる.
 |
 |
 |
| (a) Single-tip optical fiber probe (S-TOP). | (b) Four-tip optical fiber probe (F-TOP). | (c) Single-tip optical fiber probe Micro-fabricated by femto-second laser pulses (FS-TOP). (Saito et al., 2009). |
Fig. 5 Several types of the optical fiber probe.
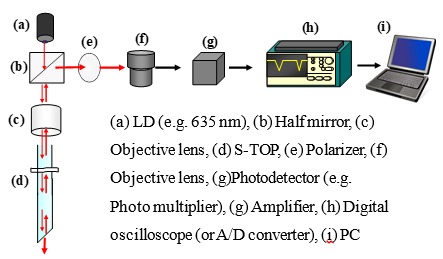
Fig. 6 A typical configuration of the S-TOP system.
(a) Photomultiplier covered with electromagnetic shield, (b) Polarizer, (c)
LD, (d) Beam splitter, (e) Objective lens, (f) S-TOP covered with a protective tube,
(g) Precision optical stage Fig. 7 A typical configuration of optics.
Fig. 7 A typical configuration of optics.
この戻り光量の変化を光電変換器で検出することで,検出端面を覆う相を検知できる.戻り光の一部はハーフミラーで反射して偏光素子に入る.計測端面,ハーフミラーやその他での反射の際に偏波面が変化することを利用して,検出端面で反射されたレーザー光のみを偏光素子により光電変換器に導いた.光学機器の実配置例を Fig. 7 に示す.微妙な光軸調整により S/N 比の高い信号を得るために,光学素子は微動ステージ上に配置した.光電変換にはフォトダイオードや光電子増倍管を電磁シールドに入れて使用した.
3・2 検出信号とデータ処理
水・空気系気泡流での光電子増倍管の出力信号の一例を Fig. 8 (a)に示す.出力信号は矩形波的ではあるが,ノイジーなバーストシグナルであり,低レベルが液相(水),高レベルが気相(空気)に対応する.Fig. 6 (b)は,STOP が気泡の中心付近を串刺しする際に現れる特徴的な信号(プレシグナル)である.信号処理では,原信号を台形波に変換するために液相レベルと気相レベルを設定した.この時,初期に行われていた Min-Max 法(最小値・最大値法)では,一見ノイズに見えるが実は光学的に重要な意味を持つ信号を捨ててしまうことになる.これを防ぐために出力の階級幅を自動的に決めてヒストグラムを作成し,液相と気相のレベルを決定する方法(ヒストグラム法,Sakamoto and Saito, 2012)を用いた.なお,3次元光線追跡シミュレーション(Sakamoto and Saito, 2012)と単一気泡実験を併用して,S-TOP 出力信号の物理的な意味(S-TOP,気泡,周囲液相から成る光学系の特性)を考察し,その結果を S-TOP の信号処理に活用した.
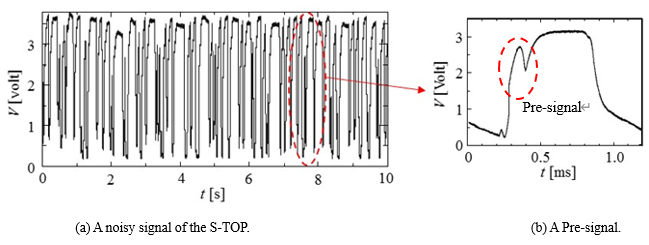
Fig. 8 A typical output signal of the S-TOP.
3・3 気泡速度と気泡径の計測ならびにS-TOP通過位置の判定
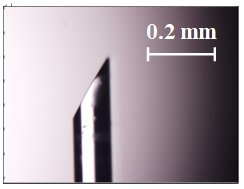
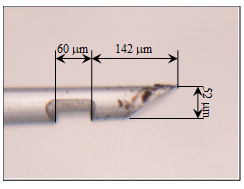
S-TOPの検出端面はFig. 9(a)に示すように楔状に研磨されている.S/N比の高い楔角度は液相,気相,コアの屈折率から決定されるが,水・空気系の場合には30ºから35ºである.プローブの検出端面がシリンドリカルの場合,同図(b)に近い信号となり単に液相と気相を検出するのみであるが,楔状の検出端面の場合,同端面が気泡に徐々に覆われるために気泡速度(厳密には気泡の上界面の速度)に応じて立上り信号のdV/dtが変化する.つまり予めdV/dtと界面速度との関係を較正しておけば,dV/dtとS-TOP楔状端面の投影長さLから気泡速度を求めることができる(Mizushima and Saito, 2012).気泡径は左記の方法で求めた気泡速度とS-TOPが気泡上界面に接触した時刻と気泡下界面に接触した時刻の差を乗じることで求めた.
プレシグナルはS-TOPから水中に放射された光が気泡の下界面で反射され,この光がS-TOPに再入射することで発生する.S-TOPが気泡の中心部近傍を気泡短軸に平行に串刺しする時,プレシグナルが最も大きくなる.この関係を使うことで,S-TOPの通過位置を判定することができる.
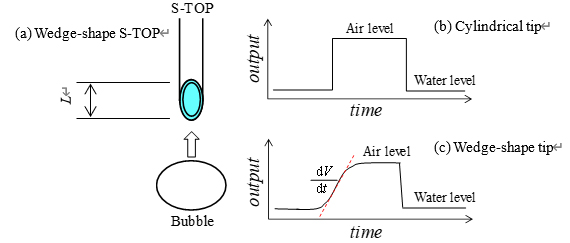
Fig. 9 Differences between output signals of the wedge-shaped S-TOP and cylindrical-tip optical fiber probe.
3・4 S-TOPによる計測時の気泡の状態
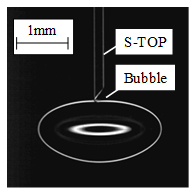
S-TOPが気泡を串刺しにする一連の過程をFig. 10に示す.同図(a)はS-TOPの検出端面先端が気泡の上界面に接触した瞬間,(b)は楔状検出端面の半分程度が気泡上界面を窪ませている状態,(c)は楔状検出端面が気泡上界面を窪ませている状態である.気泡上界面には窪み状の界面変形が見られたが,気泡全体の形状と気泡速度にはS-TOPとの接触に伴う顕著な変化は認められなかった.
 |
 |
 |
| (a) S-TOP touches on the bubble. | (b) S-TOP starts to pierce the frontal surface. | (c) S-TOP tip is in the bubble. |
Fig. 10 Deformation of the frontal surface of the bubble. (Mizushima and Saito, 2012)
4. 結 び
筆者と筆者のグループでは,速度場計測にPIVを,局所速度の計測にLDVを多用しているが,多くの先達の優れた研究があるので,それらを参照されたい.LIFとPIVとの同時計測については,別の機会としたい.混相流の研究に筆者の知見と経験がお役に立てば,望外の喜びである.