

流れ 2019年2月号 目次
― 特集テーマ:JSME年次大会特集 ―
| リンク一覧にもどる | |
主流と干渉する噴流による境界層能動制御
長谷川 裕晃 |

1.緒言
流体が引き起こす損失には,境界層の発達による流れのはく離現象が大きく関係する. たとえば流体機器においてはく離の発生は,効率低下に加え,異常振動,空力騒音を引き起こす要因となる.また,翼などの外部流れにおいて翼面上ではく離が発生した場合,揚力が低下して失速を引き起こし,墜落にいたる原因となる.このようにはく離は,工学的に極めて好ましくない現象のため,はく離を抑えることは流体力学者にとって古くからの大きな課題で,これまでいろいろな試みが行われてきている(1)~(6).
こうしたはく離を抑制するための境界制御の手法として,シンセティックジェットがある(7).シンセティックジェットアクチュエータは,振動板によりキャビティの壁面を変動させることで,オリフィス出口で渦輪を発生させる装置である.この時オリフィスからは,流体を噴出,吸引を行うため,流れ場に与える正味の流出流量はゼロとなるが,流れ場に平均流れや乱れを生じさせることができる.キャビティ内の振動板の駆動には,スピーカや圧電素子が使用される.シンセティックジェットは,こうした駆動装置の入力電圧を変えることで容易にジェットの吹出し強さを変化できる.吹出し強さを変えることで,流れ場に生じる乱れの強さを変化できることから,時間的に変動する流れ場に適合 して制御を行うことができる.くわえて,制御が不要な際は,吹出しを停止することで,制御装置が引き起こす付加抵抗を一切なくすことが可能である.本稿では,実際の翼型にシンセティックジェットアクチュエータを組込み実施した失速抑制について紹介する.失速制御は,翼面流れの状態(はく離の有無) を 2点間の壁面静圧のみで判断し,流れ場の状態に適合してシンセティックジェットの作動を自動的に行う制御系を構築して実施した.
2.翼型模型
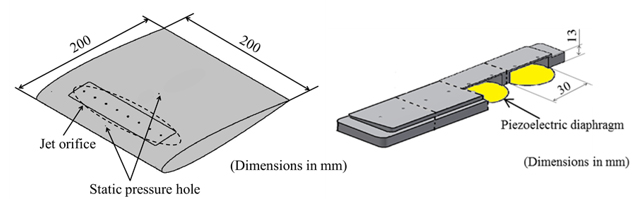
図1に使用した翼型模型を示す.翼型はNACA0012で翼弦長,スパン長はそれぞれ200 mmである.翼にはシンセティックジェットを吹出すためのキャビティ(図2)が設けられている.ジェットの吹出し口は,翼背面側に前縁から40 mmのところに8個設置した.ジェットの吹出し口は円形(直径Do=2 mm)で17.5 mmの間隔で,翼面に垂直に開いている.キャビティは4分割されていて,それぞれのキャビティに圧電振動板が一つ付いている.また,分割されている一つのキャビティに吹出し口が二つ設置されている.翼背面には,翼スパンの中心軸上に静圧孔が設けられている.構築した失速制御システムでは,二つの静圧孔の差圧のみで,失速状態か否かを判断する.
 |
|
| Fig.1 NACA0012 airfoil model with synthetic jets. | Fig.2 Enlarged view of synthetic jet cavity. |
3.翼面シンセティックジェットによる失速制御
非制御時と制御時における各迎角での揚力係数,抗力係数の比較を図3に示す.レイノルズ数の代表寸法は翼弦長である.制御時は 主流速U0とジェット速度Vjの速度比VR(=Vj /U0)=1.2, 無次元ストロークL0(= Vj /(fD0))=12(励起周波数f=500 Hz)である.制御を行うことで,失速角は非制御時の16°から20°に増加した.最大揚力係数は,制御を行うことで約11%増加した.一方,抗力係数に関しては非制御時,制御時で顕著な変化は確認できない.つまりシンセティックジェットは, 失速角の増加と失速角付近での揚抗比の改善につながる.
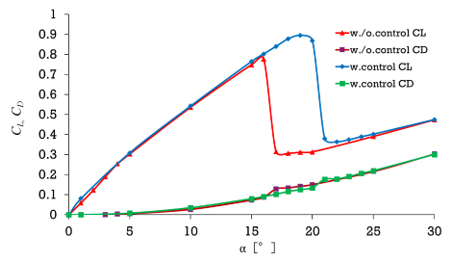
Fig.3 Lift and drag coefficients at Re=1.5×105.
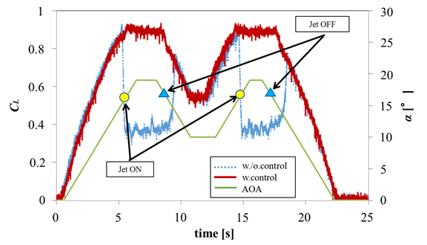
Fig.4 Time history of lift coefficient when our active stall control system operates to the time-varying flow fields (Re=1.5×105).
図4に翼の迎角αをα=0°→19°→10°→19°→0°と連続的に変化させた際に,構築した能動的失速制御システムを適用し制御を行った際の一例を示す.迎角変化時の速度は3.3°/sである.図中には,同様の迎角変化を与えた際に,システムを作動していない場合の結果を破線で示してある.翼が変化している迎角は右軸で示してある.図中の丸印(●)は,作動中のシステムがジェットの吹出しを開始したタイミング,三角印(▲)は,ジェットの吹出しを停止したタイミングである.制御時のジェットの吹出し条件はVR =1.2,L0=12で今回吹出し条件は固定し,吹出しのオン/オフのみを翼面の2点間の差圧データに基づいて自動的にシステムが判断し行った.システムは,失速の前兆を捉え,実際に失速が起こる直前に吹出しを開始している.このため,揚力係数は低下することなく迎角19°に達する.一方,迎角が減少し失速回避の迎角に到達すると,システムはジェットの吹出しが不要と判断し自動的に吹出しを停止する(▲印).その後再び迎角を10°から19°に変化させた場合においても,失速の前兆を判断し吹出しを開始し,失速を抑制することができた.そして,吹出しが必要な範囲では吹出し状態を維持し,迎角が減少しジェットの作動が不要になった際には,再び吹出しを停止している.
4.結言
シンセティックジェットアクチュエータを組み込んだ翼型模型を製作し,失速制御効果を風洞試験で確認した.さらに,翼背面上に設けた静圧孔から翼面流れの状態(はく離の有無)を判断し,流れ場の状態に適合してシンセティックジェットの作動を自動的に行う制御系を構築し,その有効性を確認した.