

流れ 2013年10月号 目次
― 特集テーマ:2013年度年次大会 ―
| リンク一覧にもどる | |
水泳動作を行うロボットに作用する非定常流体力の計測とモデル化
中島 求 東京工業大学理工学研究科 |

1. はじめに
水泳は広く親しまれているスポーツであるが,その力学的なメカニズムは十分解明されているとは言い難い.その理由はスイマーまわりの流れの複雑さに起因する.複雑な形状のスイマー身体が,自由表面も含む高レイノルズ数の流れの中で,多くの関節自由度により複雑な三次元非定常運動を行うわけであり,これを理論的に扱うのは多大な困難を伴う.しかし,スイマーに作用する非定常の流体力の特性が解明されれば,競泳選手のパフォーマンス向上や,水泳用の用具や装具の開発など,さまざまな方面での応用が期待できる.そこで著者の研究グループではこれまで,ロボットを用いて,スイマーに作用する非定常流体力を測定し,さらにモデル化することに取り組んできた.ロボットとしては,四肢に作用する流体力用の水中ロボットアーム,および体幹に作用する流体力用のスイマーマネキンロボットの二種類である.本稿ではこれらの取り組みについて紹介する.
2. 水中ロボットアームに作用する流体力の計測とモデル化[1][[2]
図1に流体力測定実験用として開発した水中ロボットアームを示す.本ロボットアームは胴体部・肩部・上腕部・前腕部・手部によって構成される(本ロボットアームは上肢・下肢両方の動作が可能であるが,ここでは上肢として説明する).肩に3自由度,肘に2自由度を有し,これら合計5自由度の組み合わせによって泳動作を再現する.上腕部,前腕部,手部それぞれの付け根部分にはひずみゲージを用いた3軸モーメントセンサが取り付けられ,人体の肩,肘,手首にあたる部分のモーメントを計測する.胴体部上面には分力計が取り付けられ,ロボットアーム全体に加わる荷重を計測する.手部は着脱可能な構造とし,上肢の動作を行う際には手部模型を,下肢の動作を行う際には足部模型を取り付けた.手部模型としてクロール,平泳ぎ,バタフライ用の右手と,背泳ぎ用の左手,足部模型としてクロール,背泳ぎ,バタフライ用の足先を伸ばした底屈状態と,平泳ぎ用の足先を立てた背屈状態の合計4種類を用いた.また下肢の動作を行う際には,腿(上腕部)の径と脛(前腕部)の径の比率が日本人標準体型と同等になるよう,腿に発泡ウレタン製のアタッチメントを取り付けた.また泳動作はコンピュータ制御により任意に設定可能である.実験では上肢および下肢の動作としてそれぞれクロール,平泳ぎ,バタフライ,背泳ぎの4泳法を行った.
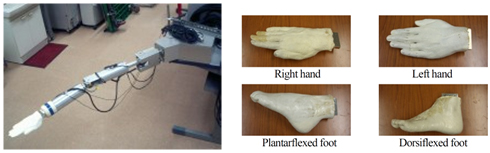
Fig. 1 Developed underwater robot arm (left: whole view, right: foot part)
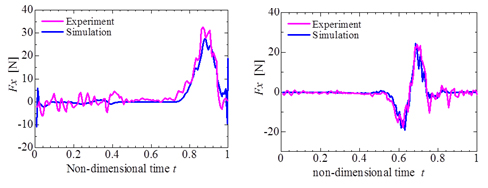
Fig. 2 Comparison between simulated and experimental results
(left: Crawl I for upper limb, right: breaststroke for lower limb)
ロボットアームに作用する流体力は,流体の付加質量による慣性力,楕円錐台長手軸に対して法線方向の抵抗力,接線方向の抵抗力,および浮力の和として表されると仮定した.そして流体力モデルにおける係数(流体力係数)の同定を行った. 同定された流体力係数を用いたシミュレーションと実験の比較結果を図2に示す.左がI字ストロークのクロールの上肢,右が平泳ぎの下肢の場合である.両者は全く異なる泳動作であるにも関わらず,シミュレーションと実験は良好な一致を見せていることが確認できる.
3. スイマーマネキンロボットに作用する非定常流体力の計測とモデル化[3]
上記の水中ロボットアームは四肢に作用する流体力を測定するためのものであったが,著者の研究グループでは,スイマー身体の残りの部分である体幹に作用する流体力を測定するためのスイマーマネキンロボットも開発し,非定常流体力の測定およびモデル化を行っている.アプローチとしては水中ロボットアームの場合とまったく同様である.図3にスイマーマネキンを示す.実際の水泳選手の身体形状を3Dボディスキャナーで測定し,3Dプリンタを用いて表面シェルを製作した.本マネキンを図4に示す水上の駆動装置に4本のストラットを介して接続した.本装置により,マネキンをピッチ,ロール,ヨーの3自由度方向に駆動することが可能である.4本のストラットの先端部には,歪ゲージ式の力センサが内蔵されており,マネキンに作用する流体力を測定することが可能である.そして流体力モデルの係数を,シミュレーション結果と実験結果がなるべく良く一致するように決定した.同定した流体力係数を用いて行ったシミュレーションと実験の比較結果を図5に示す.平泳ぎの動作(ピッチおよびヒーブ)の場合であり,シミュレーションは実験の波形の特徴を良く再現できていることがわかる.
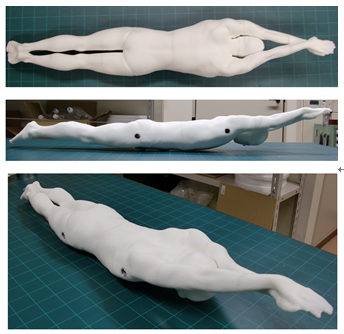
Fig. 3 Photographed swimmer mannequin
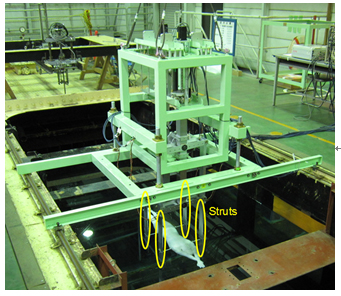
Fig. 4 Photographed driving mechanism
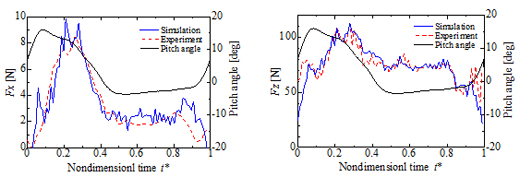
Fig. 5 Unsteady fluid forces in breaststroke
(left: propulsive direction, right: vertical direction)
4. おわりに
本稿では著者の研究グループにおける,水中ロボットアームとスイマーマネキンに作用する非定常流体力測定とそのモデル化について紹介した.非定常流体力の測定やモデル化は,理論的に確立されていないことも多く,ケースバイケースでの対処が必要となる.著者らの事例が何らかの役に立てば幸いである.
参考文献
| [1] | 高橋明美,中島求,“水中ロボットアームを用いた水泳時の四肢に働く非定常流体力の解明(水中ロボットアームの開発と流体力測定実験)”,日本機械学会論文集 B編,Vol. 75, No. 750 (2009), pp. 284-293. |
| [2] | 高橋明美,中島求,“水中ロボットアームを用いた水泳時の四肢に働く非定常流体力の解明(第2報,実験結果に基づく流体力のモデル化)”,日本機械学会論文集 B編,Vol. 76, No. 761 (2010), pp. 66-75. |
| [3] | Nakashima, M and Ejiri, Y., “Measurement and Modeling of Unsteady Fluid Force Acting on the Trunk of a Swimmer Using a Swimmer Mannequin Robot”, Journal of Fluid Science and Technology, Vol. 7, No. 1 (2012), pp.11-24. |
