

流れ 2020年2月号 目次
― 特集テーマ:流体工学部門講演会 2月号 ―
| リンク一覧にもどる | |
各種噴流現象、及びはく離流れの流動制御
社河内 敏彦 三重大学 |

1. 緒 言
本稿は,第97期流体工学部門講演会における標記題目での基調講演(多種,多様な流動制御について,その一部を著者の研究も含めて概観,紹介した.)を要約したものである.
噴流,後流,及びはく離流れは,流体力学の基本的な事象,例えば,自由,及び壁面境界層流れ,せん断流れ,渦流れ,流れの混合,拡散,などを含んでいるため,基礎的,実際的に重要な事項である.ここでは,主に,噴流の拡散(拡がり,巻き込み)の制御,騒音,推力ベクトルの制御,及び流れの剥離の制御,などについて述べる.
これらの流れについて,すなわち,混合・拡散の促進,流体騒音の低減,はく離の抑制,流動抵抗の低減,噴流のベクタリング,など望ましい流動状態を得ることを目的に流れの制御(Flow control)がおこなわれる(1), (2).
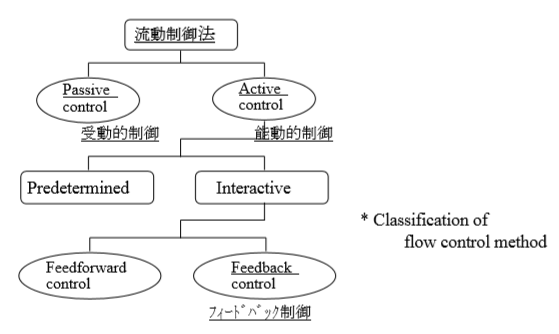
流れの制御には,流路形状を少し変える,タブ・リブ・撹乱増幅素子,などを設置するなどで,特に外部からエネルギーを付加することなくおこなわれる受動制御(Passive control)と能動制御(Active control)とがある(付図).受動制御は,簡便で経済的な方法であるが,複雑な,或いは時々刻々変化するような流れを制御するには,能動制御による必要がある.
また,能動制御には,いわゆるフィードバック制御(Feedback control)と,外乱が与える影響を予め推測し,事前に修正をおこなうFeedforward control とがある.これらの能動制御のためには,流動状態の把握,制御目標の設定,センサー・センシング技術,アクチュエーター,データ収集処理方法・装置,制御方法・理論,などが必要で,それらを高度におこなうには,計算機,プログラミング,制御技術,IT(情報工学,Information Technology),AI(人工知能,Artificial Intelligence),などの理解,実施が求められる.
2. 概要
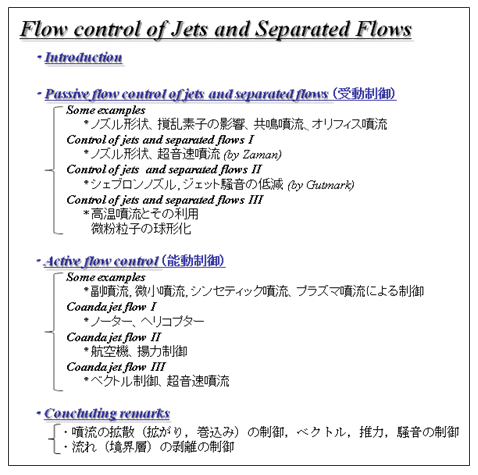
表1に本稿の内容の項目,概要を示し,以下でその流れの制御についての幾つかの例を示す(2).
Table 1 Contents
3. 噴流の受動制御(ノズル形状による流動制御)
3.1 ノズル出口速度分布
噴流のノズル出口近傍の速度分布,拡がり,巻き込み特性,などの流動特性はノズル形状によって大きく影響される.
基礎的な事項の一つとして,パイプノズル,四分円ノズル,及びオリフィスノズルからの空気噴流のノズル出口直後(at x/d0 = 0.2)の速度分布が,ノズル出口直径d0 = 10.0 mm,オリフィスノズルについては絞り面積比を CR = 0.11 – 1.0(1.0:パイプノズル)に変化させノズル出口レイノルズ数 Re = 1.5 × 104 で,ノズル形状の影響の観点から検討された.その結果,平行部が長い(L/d0 = 50)パイプノズルからの噴流の速度分布は1/7 乗則で良く表わされ,四分円ノズルからの噴流は境界層の薄い平坦な分布形となるが,オリフィスノズルからの噴流の速度分布形はCRの影響を強く受けノズル出口での縮流の結果,噴流外縁で最大流速をもちその大きさ,及び速度勾配はCRの減少とともに増大する,また,乱れ強さは速度勾配の大きな外縁で大きくCR = 0.11 ではパイプ噴流(CR = 1.0)の約1.41倍に増大する,及びオリフィス噴流の巻き込み流量は噴流外縁での速度勾配が大きいため大きく,例えば,CR = 0.11 のオリフィス噴流の巻き込み流量はx/d0 = 7.0 ではパイプ噴流の約1.5倍になる,などが明らかにされた(2)-(4).すなわち,ノズル形状,オリフィスノズルのCRを変化させることで,噴流の拡がり,巻き込み特性を制御することができる.
3.2 噴流のタブ,リブ,撹乱増幅素子による制御
Carletti, M.J. et al. (5) は,円形ノズル出口の内壁に長方形,及び三角形の小物体の設置による噴流の拡散,乱れの制御について示した.また,宮越ら(6) は,二次元ノズル内に設置した小物体から放出される渦列とノズルからのそれを干渉させて二次元噴流の拡がりを制御することを示した.すなわち,ノズル幅h = 15.0 mm (アスペクト比,AR = 20)のノズル内に直径 d/h = 1.2 の半円柱を x/h = - 7.0 の位置に設置した場合(ノズルレイノルズ数:2508),噴流の半値幅は下流の x/h = 30 で何も設置しない場合の約1.63倍に拡大するが,d/h = 0.2 の円柱を x/h = -4.0 の位置に設置した場合には約0.84 倍に縮小するのを示した.
3.3 超音速不足膨張噴流の流動制御,シェブロンノズル
Zaman, K.B.M.O. (7) は,円形,楕円形,長方形などのノズルから噴出されるマッハ数 M = 1.63 の超音速不足膨張噴流について,ノズル出口に設置した小さな三角形状のタブによって噴流の拡がりを大きく増大させることができる,及び噴流騒音を低減できる,などを示した.
Gutmark, E. et al. (8),(9) は,ジェットエンジン(図1)からの高温、高速の噴射噴流による流体騒音の低減を目的に,シェブロンノズル(図2, 3,ノズル直径:70.0 mm)からの噴流の流動,騒音特性を検討した.
図3に,マッハ数 Mj = 1.56の噴流のシャドウグラフによる可視化写真を示す.シェブロンノズルからの噴流では出口角部からの撹乱が干渉し衝撃波が弱められているのが分かる.また,その結果,1.5 ~ 4.0 kHz の範囲での音圧, SPL, を低下させることができるのを示した.

Fig.1 Jet engine with chevron nozzle of Boeing 787
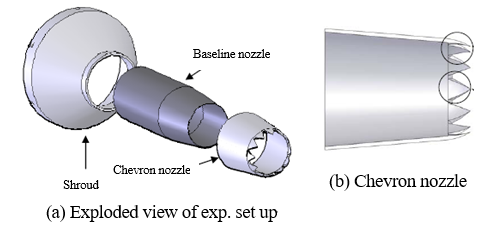
Fig.2 Chevron nozzle arrangement (8)
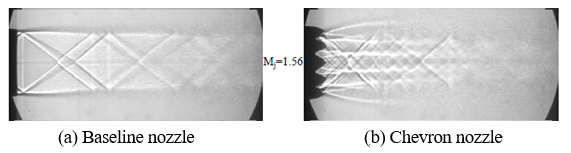
Fig.3 Averaged shadowgraph image with and without chevron nozzle (100 images averaged) (8)
4. 噴流,及び流れの能動制御
4.1 同軸副噴流による制御
同軸の多重管噴流によって,主噴流の流動特性を制御することが試みられている.一例として,微粉粒子[複写機のトナー(融点:百数十℃,平均粒径:6~7 μmの樹脂製の微粉粒子)]の高温噴流,同軸副噴流を使った球形化(10) がある.一般に複写機のトナーはジェットミルを使って粉砕法で作られることが多く角ばった形状をもつが,その流動性を良くする,及びコピーの質を上げる,などを目的に球形化がおこなわれる.
従来,300℃の高温空気噴流中に四方から微粉粒子(トナー)を含む固気二相噴流を流入させ,角ばった粒子を溶融させた後に表面張力によって球形化させ下流で冷却,形状を固定化する方法が使われていたが,同軸副噴流を使って粒子の飛行軌跡を制御し球形化の効率を改善,向上させた装置(三重管)が検討された.粒子は中央のノズルから固気二相噴流として噴出されノズル出口後の分散板に当たって半径方向に拡がり(拡がりは,副噴流 によって制御される)外側の高温の同軸環状噴流中を飛行する.すなわち,前記の装置に比べ粒子の大半が高温空気噴流中を飛行し球形化効率が改善,向上される.例えば,粉砕法で作られた平均粒径Dp50 = 7.4 μmのポリスティレン・トナーを三重管を使って流れを制御し球形化処理すると,円形度,カップリングなどについて同一特性を得るのに熱効率はパイプノズルの約2.4倍に改善,向上されることを示した.
4.2 音波,アクチュエータ,などによる流動,変動,大規模渦の構造の励起
噴流やはく離流れから放出される大規模渦を,音波やアクチュエータを使って渦放出振動数を考慮して励起することで流れの変動を増幅,抑制することができる.
* マイクロアクチュエータによる流動制御
Suzuki, H. et al. (11) は,直径20.0 mm の円形ノズルの出口手前内側の円周面上に18個の小さなelectromagnetic flap actuator を設置し,これらを任意に制御,稼働させ二股に分かれた噴流など、多種多様な流動形態を実現できる(混合特性を制御できる)のを示した.
4.3 Sub-, Micro-, Synthetic-jets, Plasma-actuator による流動制御
主噴流の流れを小さなSub-jet(副噴流), Synthetic-jet(箱の底に設置したダイアフラムを往復運動させ他方に設けた孔,ノズルから間欠的に噴流を噴射する), 及び Plasma-actuator (12) などを使って,すなわち小さな力を使って,主流れの拡散を増幅させる,或いは主噴流のベクトルを制御する,などのことがおこなわれている.
* Plasma actuator
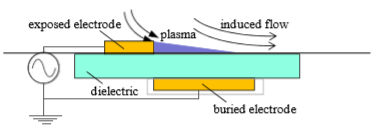
Fig.4 Plasma actuator (by dielectric barrier discharge, DBD)
図4 に示すように,誘電体(dielectric)の表裏両面に電極を設置し交流電圧(E = 2 ~ 8 kV, f = 4 ~20 kHz)を印加するとDBD plasma 放電が生じ周囲の流体に誘起流れが生じる.この誘起された流れを使って,航空機や風車の翼周りの流れ(はく離)の制御がおこなわれる.
4.5 Coanda jet flow
ヘリコプターは大きな回転翼(主ローター)によって揚力を得ているが,その際,機体には反力としての回転力が作用する.その反力を打ち消すために,尾部にエンジン出力の一部を使い幾つかのギア,長いシャフトを介して回転させられるテイルローターがある.しかし,その機構は複雑でトラブルのもとでもある.
ところで,テイルローターを有しないNOTOR (13)(NO TAil Rotor, MD-520, 図5)ヘリコプターでは太いテイルブーム内に送風機を使って空気を送りブームの片側の側面に設置したスリット[図5 (b), (c)]から噴出させる.主ローターからの下向きの強い流れ(downwash)はコアンダ効果によってブーム表目に沿って流れ,スリットからの噴流流れ[図5 (c)]によって(はく離が抑制され)加速され圧力が低下する[図 5 (c)].その結果,揚力が生じ[図5 (b)]anti-torque として作用する.流れの制御によって揚力(anti-toque)を得る本システム,すなわち,従来のテイルローターによる方法と全く異なる簡便なシステムは非常に興味深い.
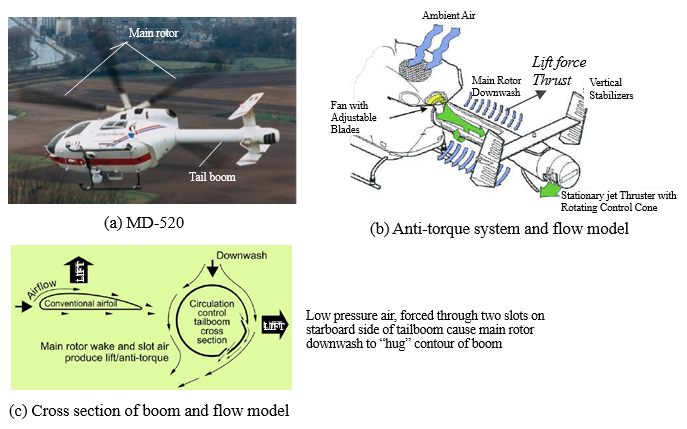
Fig.5 NOTAR (NO TAil Rotor) helicopter, MD-520
[MD 500 Series, Technical Description (13) ]
ところで,航空機における流動制御は,主に機体や翼の流動抵抗の低減,翼の揚力増加のための流れのはく離の抑制,防止,などのために受動的、能動的な制御が多種多様におこなわれる.エンジンについても,同様である.特に,材料,加工,センサー、計算機などの飛躍的な発展によりその進歩には目覚ましいものがある.
例えば,救難飛行艇US-2では短距離での離着水や着水時の衝撃を和らげるため極めて低速での着水速度 ULを実現している(UL≒100 km/h, 着水距離:280 m, 機体重量:43 ton).低速で高揚力を得るため高迎角時に生じる翼面上の流れのはく離を抑制,防止するためにBLC[Boundary Layer Control, 境界層制御,小さい多数のノズルからの噴射噴流とコアンダ効果を使って]がそれ専用に装備されたガスタービンエンジンを使ってなされ,最大揚力係数7以上(通常の2倍以上)を得ている(14).
4.6 超音速噴流のフルイディクベクトル制御
従来,ジェットやロケットエンジンの推力ベクトルの制御には複雑な機械的な機構が用いられことが多いが,これらの機構の簡易化は極めて重要である.ここでは,遷音速,超音速噴流の巻き込み作用とコアンダ効果を利用した噴流のベクトル制御についての提案を示す(15).
図6 (a) に,直径4.0 mm のパイプノズル(Pi-ノズル)とスペーサー,及び開き角度 α = 10˚ のコアンダノズル(Co-ノズル)から成るFC-ノズルを示す.Co-ノズルの片面には内径2.2 mm のサクションパイプ(Su-パイプ)が円周方向に8個設置されている[図6 (b)].いま,Su-パイプを全て開けるとPi-ノズルからの噴流はSu-パイプから全周囲の流体を巻き込みながら真っ直ぐに流下する[図6 (a)].一方,例えば,Su-パイプの ④, ⑤ 以外を閉じる[図6 (b)]とそちら側のCo-ノズル壁と噴流間の圧力が低下し噴流は閉じた側へ偏向し,コアンダ効果によりCo-ノズル壁に付着して流下する[ベクトル制御,図6 (c)].
図7に,その間の流れの可視化写真を示す.噴流の供給圧力は,P0 = 0.38 MPa で噴流に膨張,圧縮の際の衝撃波がみられ,図7 (a), (b) のそれぞれで,上記の直進,及び偏向する噴流の流動状態が示されている.なお,全てのSu-パイプを閉じた場合にもPi-ノズルからの噴流は真っ直ぐに流下する.
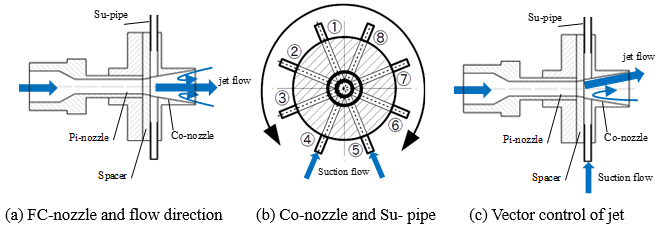
Fig.6 Fluidic vector control of supersonic jet flow (15)
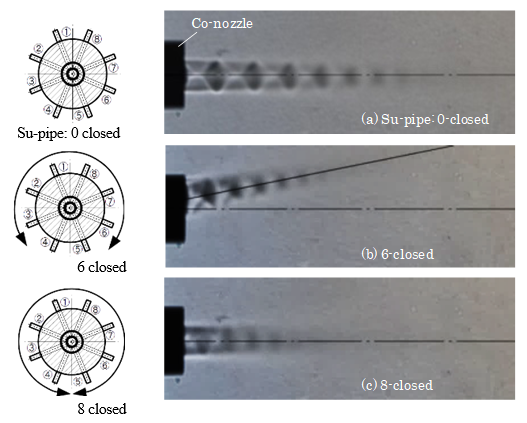
Fig.7 Visualized flow pattern of vector controlled supersonic jet flow
(by Schlieren method, P0 = 0.38 MPa)
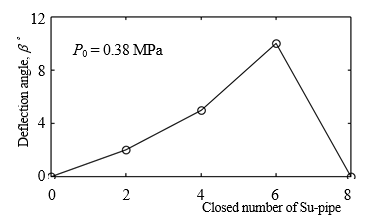
Fig.8 Deflection angle, β˚
図8に,P0 = 0.38 MPa での噴流の偏向角度β˚ とSu-パイプを閉じた個数nとの関係を示す.βは,n = 6で最大値10˚ になる.
5. まとめ
流れ現象は流路形状に大きく影響され,流れの壁面からのはく離,はく離渦の生成・放出,などにより,流れに不規則な或いは規則的な変動,振動現象が生じる.流れのはく離,はく離渦の生成・放出,振動などの現象は,多くの場合,効率的な流体輸送に関して好ましくないので流れの制御が行われる.流動状態を良く知り,それをどのように(制御)したいのか,そのためには何をどうするのか,などを明らかにすることが肝要である.
なお,一般には,Feedforward controlの精度をAIを使って向上させ,それとFeedback controlとを組み合わせた制御手法,などの確立が望まれる.
本稿では,噴流,後流流れ,及びはく離流れのpassive & active 制御について,わずかな例の一端を示し概説した.なお,流動制御に際し流動状態,特性の理解だけでなく,流動状態のセンシング,制御手法・ツール,データの収集・整理,計算機・ソフトウエア・プログラミング,などの理解,使用は必須である.
謝 辞
本稿では,多くの文献を参考にさせていただいた.記して謝意を表す.
文 献
| (1) | Kral, L.D., “Active Flow Control Technology”, ASME Fluids Engineering Div. Technical Brief, (1998), pp.1-28. |
| (2) | Shakouchi, T., “Passive flow control of jets”, Mechanical Engineering Review, JSME, Vol. 7, No. 1 (2020), P.19-00386. |
| (3) | Shakouchi, T., Kito, M., Sakamoto, T., Tsujimoto, K., and Ando, T., “Flow Control of Jet Flow by Passive Nozzle Con- figuration Changes”, Int. J. of Flow Control, Vol.1, No.1 (2009), pp.73-85. |
| (4) | Shakouchi, T., “Jet Flow Engineering – Fundamentals and Applications –”, Morikita-Shuppan, Japan (2005). |
| (5) | Carletti, M.J., Rogers, C.B., and Parekh, D.E., “Parametric Study of Jet Mixing Enhancement by Vortex Generators, Tabs, and Deflectors Plates”, ASME-Publications-FED, (1996) -academia.edu. |
| (6) | Miyakoshi, K. and Hanyu, H., “Coherent Structure in a Two-dimensional jet passively controlled wake of cylinder in- stalled in nozzle contraction”, Trans. of JSME, Ser. B, Vol.69, No.678 (2003), pp.328-345. |
| (7) | Zaman, K.B.M.Q., “Spreading Characteristics of Compressible Jets from Nozzles of Various Geometries”, J. Fluid Mech., Vol.383 (1999), pp.197-228 |
| (8) | Munday, D., Heeb, N., Gutmark, E.J., Liu, J., and Kailasanath, K., “Acoustic Effect of Chevrons on Jets Exiting Conical C-D Nozzles”, Proc. of 15th AIAA/CEAS Aeroacoustics Conf. (30th AIAA Aeroacoustics Conf.), (2009), pp.1-241. |
| (9) | Gutmark, E.J., Callender, B.W., and Martens, S., “Aeroacoustics of Turbulent Jets : Flow Structure, Noise Sources, and Control”, JSME Int. J. Ser. II, Vol.49, No4 (2006), pp.1078-1085. |
| (10) | Nakamura, H., and Shakouchi,T., “Globular Formation of Fine Particle Using a New High Temperature Air-Jet-Flow System ”, J. of Powder Technology, Elsevier, 166 (2006), pp.14-23. |
| (11) | Suzuki, H. And Kasagi, N., “Active control of an axisymmetric jet with distributed electromagnetic flap actuators”, Experiments in Fluids, Vol.36, No.3 (2004), pp.498-509. |
| (12) | Touchard, G., “Plasma actuators for aeronautics applications – State of art review – ”, Int. J. of Plasma Environmenntal Science and Technology, Vol.2, No.1 (2008), pp.1-24. |
| (13) | “MD Helicopters, Technical Description”, www.mdhelicopters.com |
| (14) | US-2 (2017), http://www.shinmaywa.co.jp/aircraft/us2/ |
| (15) | 社河内敏彦,田ノ上飛翔,辻本公一,安藤俊剛,“コアンダノズルによる遷音速,超音速不足膨張噴流の ベクトル制御”,日本機械学会2018年次大会講演論文集,No.18-1 (2018), S0510303. |