

流れ 2024年11月号 目次
― 特集テーマ:2024年度年次大会 ―
| リンク一覧にもどる | |
ドローン用高推力化ガイドの性能評価
 |
加瀬 篤志 |
1.はじめに
本記事は2024年度年次大会で企画されたEFDワークショップでの講演について述べる.このような機会を設けていただいた渕脇正樹先生(九州工業大学)を始め,関係する先生方に謝意を表する.内容的に至らぬ点は多々あるが,少しでも参考になれば幸いである.
ドローンは近年,ホビー用の小型機から産業用の大型機に至るまで,幅広い用途で様々な形で活用されており,今後も市場規模は拡大していく見込みである(1).特に回転翼を複数使用して飛行するマルチコプターは,長い歴史のある回転翼の知見に,素材・バッテリー等のハード面,通信・制御システム等のソフト面の両面において様々な技術が融合することで急速に発展を遂げている.一方で滞空時間・航続距離の不足や騒音等,技術的な課題は依然として山積しているのが実状である.また一般に市販の機体は高価であり,同一機体を出来るだけ長期間,様々な用途で活用したいという潜在的な需要も想定される.そこで,既存のドローンの性能を低コストで簡便に向上させる方法として,ガイドを外付けすることで高推力化する方法を提唱した.エネルギー消費の少ない手段での推力増加は低燃費化にも繋がり,結果的に滞空時間・航続距離の延長も期待できる.ここでは提案するガイドの効果の検証を目的として,シングルロータにガイドを取り付けた供試ユニットに対して行った実験の一部を紹介する.
2.提案ガイドの構成
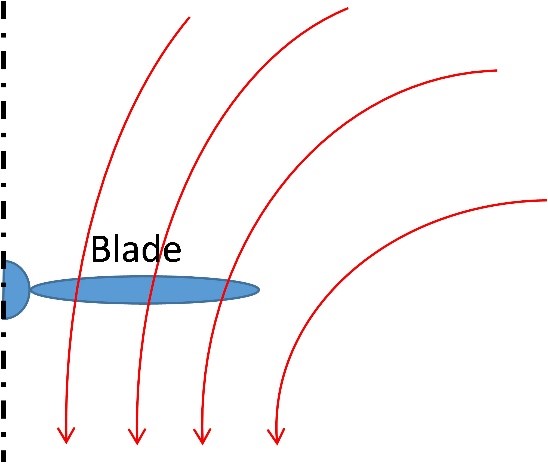
図1に提案するガイドの構成の模式図を示す.ガイドの主要パーツは,アニュラス状の底板と円筒状の側周板のみである.実際にはロータ及びガイドを保持するためのステーが必要ではあるが,ここでは省略している.図2はガイドの有無によるフローパターンの変化を模式的に示したものである.翼の回転面に流入する流れ(特に側方からの流入)の一部が側周板端部で剥離し,底板の上流側に負圧領域が形成・保持されることで,底板表裏の圧力差が増大し,上流側向きの力が底板に作用する.この力を推力として利用することで,ロータ+ガイドのユニットとしての総推力が増加する仕組みである.本ガイドは形状が単純で部品点数も少ないため,設計・製造コストは低く抑えられ,導入へのハードルが低い.またガイドは外付けパーツであるため,使用状況に応じて容易に換装が可能である.これらの特長は,現有機の長期多用途での運用という需要を満足することが期待できる.
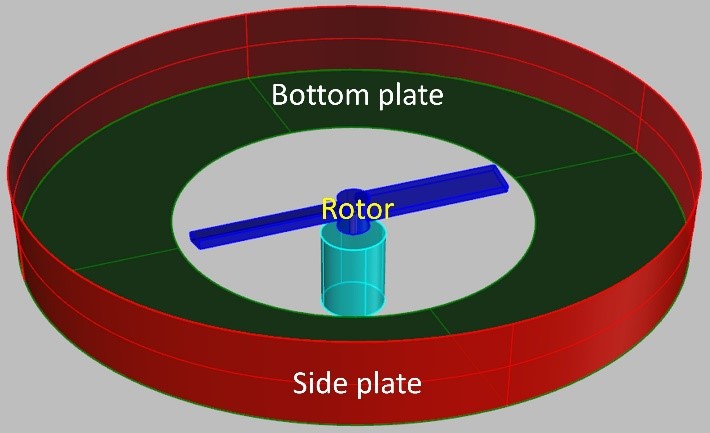
Fig. 1 Schematic of the guide.
 |
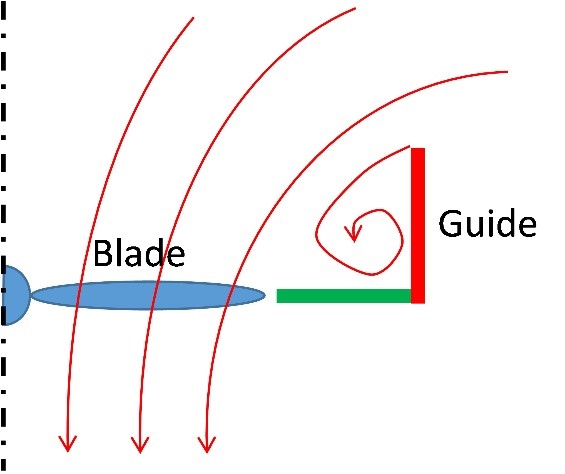 |
| (a) Without guide | (b) With Guide |
| Fig. 2 Flow into the rotational plane of the blade. | |
ダクテッドファン(2)を始めとして,回転翼の外周にシュラウドを設置して高推力化する方法は知られている.その推力増加メカニズムは主として整流や増速,あるいは翼端渦の抑制によるものであり,積極的に流れを剥離させる本ガイドとは本質的に異なる.また一般にシュラウドの形状がいわゆる流線形であり,設計・製造コストは必然的に高くなる.一方,外周部に設置したパーツでの流れの剥離を有効活用するという本ガイドのコンセプトは,プロペラ式風車用のつば付きディフューザー(風レンズ)(3)でも見られる。実際本ガイドは,風レンズの原理に着想を得たものであるが,形状・用途・原理のいずれも全くの別物である.単純な形状であることもあり,他にも掘り起こせば似た形状のものは散見されるが,本ガイドの構成はそのオリジナリティが認められ,特許を取得している(4).
3.ホバリング時の性能測定実験
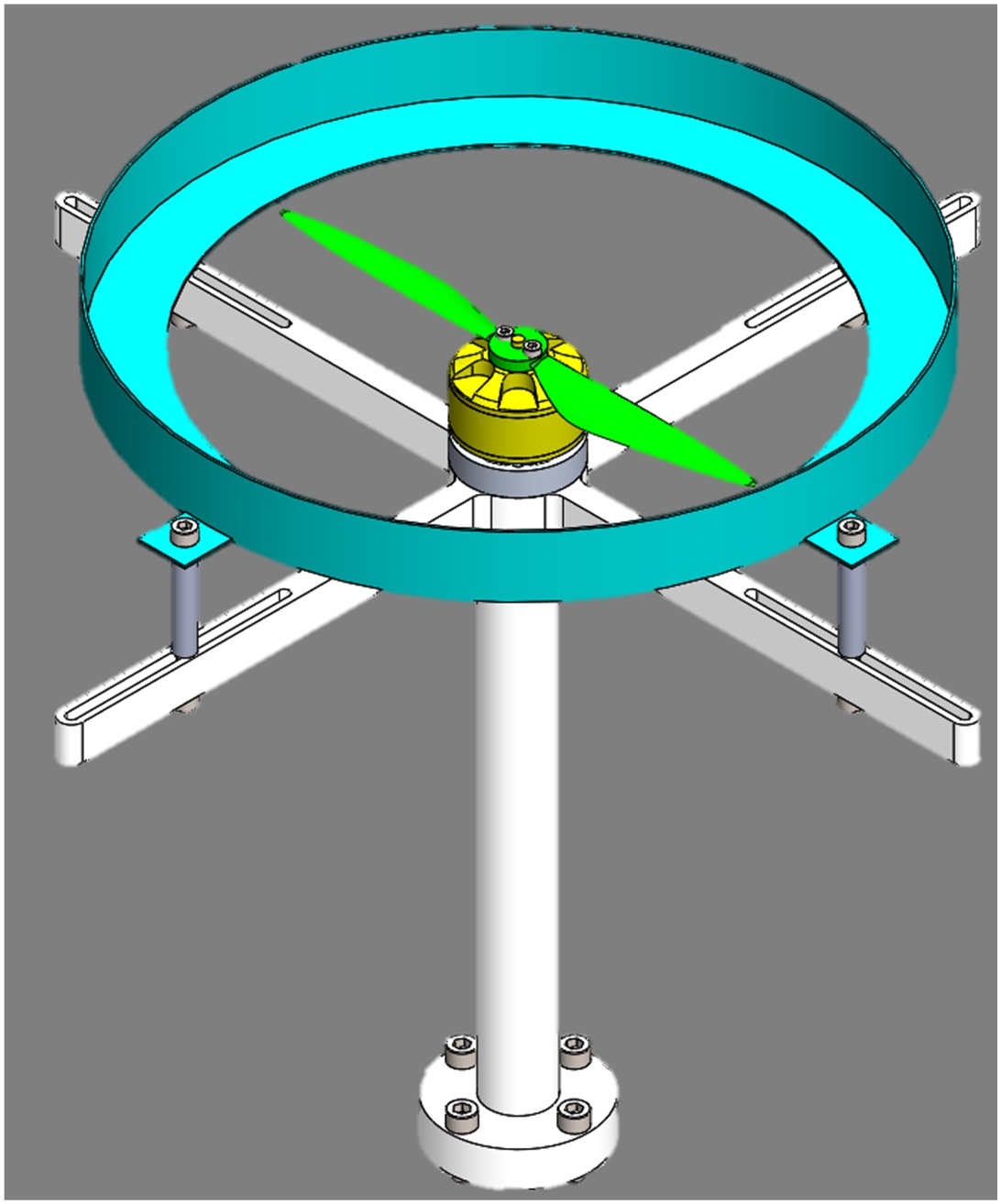
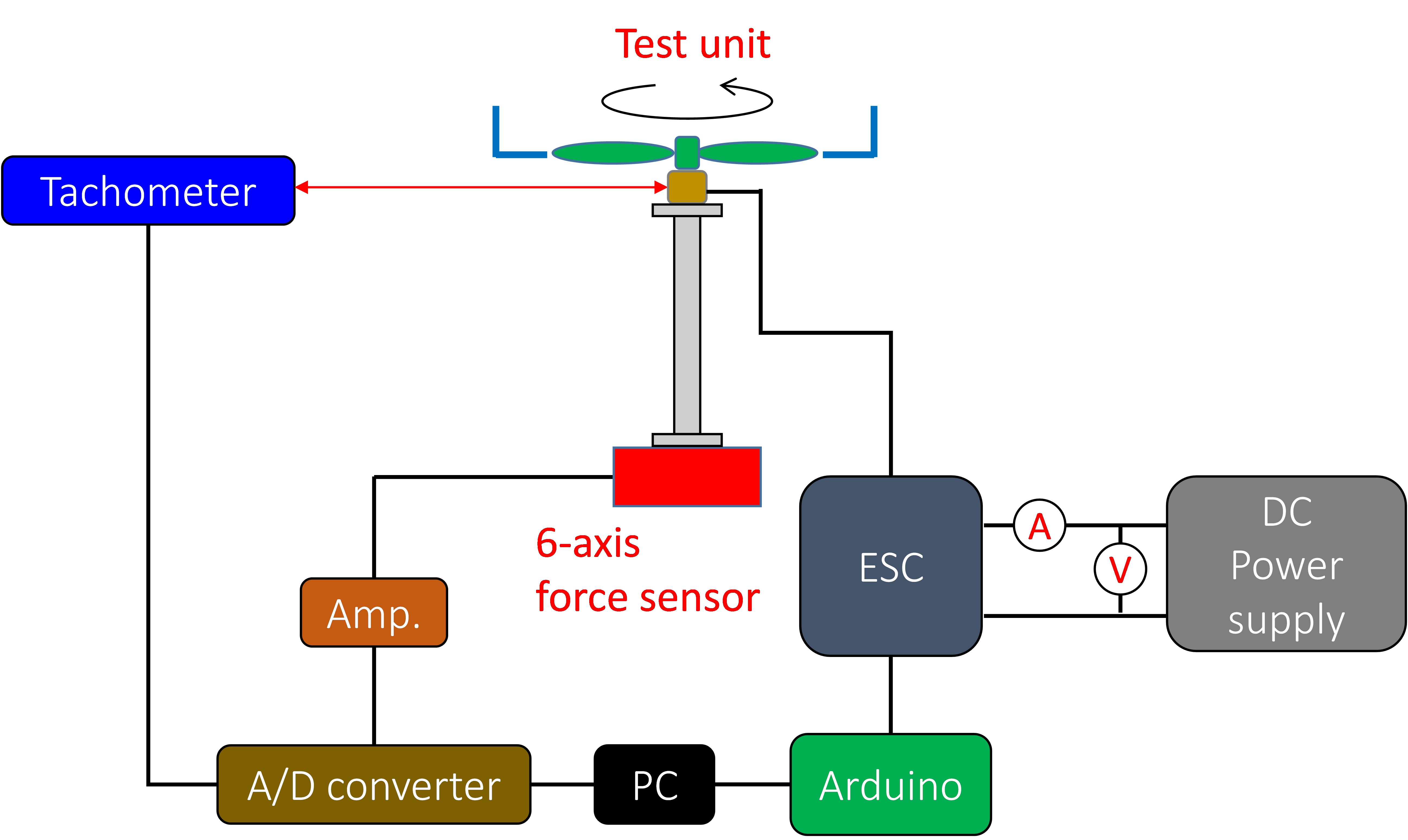
EFDワークショップ当日の発表では様々な実験結果について紹介したが,ここではホバリング状態を想定して静止流体中に設置したシングルロータのユニットの性能測定実験について述べる.図3に実験装置の構成の模式図を示す.
 |
 |
| (a) Test unit | (b) Device configuration |
| Fig.3 Experimental setup. | |
供試ユニットはロータとガイド及びそれらを保持するステーと支柱で構成され,6軸力覚センサ(BL Autotec,MINI 2/10)に固定されている.ロータとガイドに作用するトータルの力及びトルクが,ステーと支柱を介して力覚センサに伝わり,A/D変換器を介してPCに記録される.ロータにはドローン用に市販されている直径Dw = 8インチ,CFRP製の2枚翼(Hyperion,M1-P080055CFT)とブラシレスDCモータ(T-MOTOR,MN3510 KV700)を使用した.モータはESC(T-MOTOR,Air 15A)とArduinoを介して,PCからのPWM制御により駆動する.回転数はモータ側面の一箇所にアルミテープを貼り,光学式タコメータ(小野測器,HT-5500)を用いて測定し,力覚センサの出力とともにA/D変換器を介してPCに記録される.またESCへの電源供給ライン上に電圧計,電流計を設置することで消費電力を測定した.ここではガイド直径Dg = 1.28 Dw,ガイド高さHg = 0.12 Dwのガイドを使用した結果について述べる.
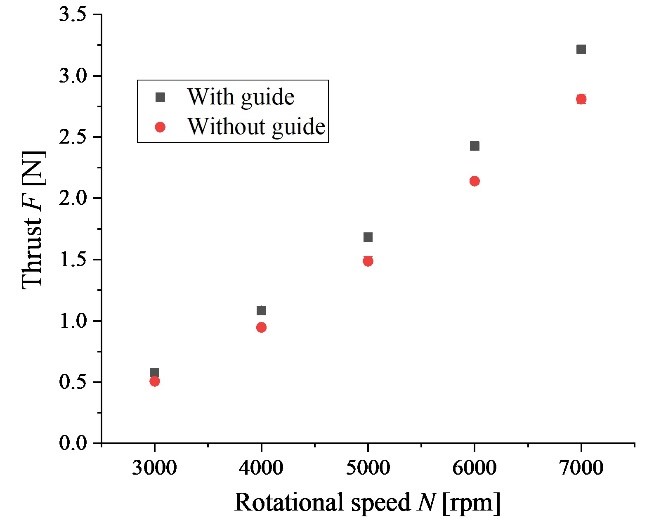
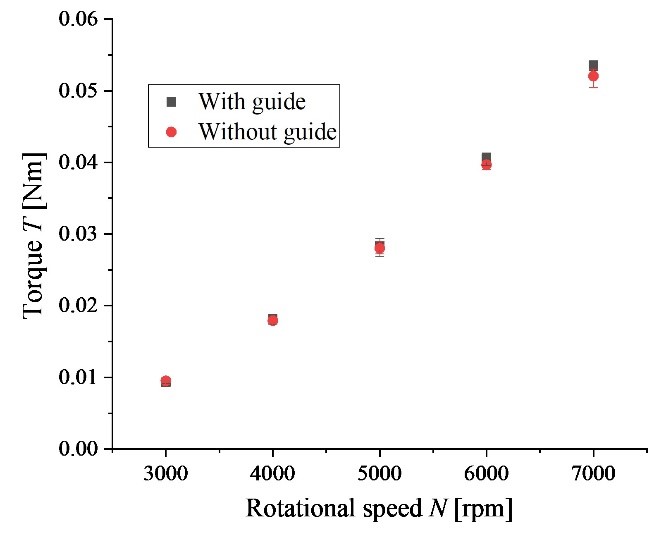
図4に各回転数N [rpm]において測定された推力F [N]及び回転軸周りのトルクT [Nm]の結果を示す.図4(a)より,いずれの回転数においてもガイドを付与することで推力は明らかに増加している.一方図4(b)から,トルクはガイドの有無による差があまり無く,ガイド有りの方がやや大きい程度である.
 |
 |
| (a) Total thrust | (b) Torque around the axis of rotation |
| Fig.4 Variation of total thrust or torque for rotational speed. | |
測定した値から式(1)でロータ出力P [W]を求め,消費電力E [W](= 電圧 × 電流)を用いて式(2)で与えられるロータ出力効率![]() を算出した.
を算出した.
| (1) | |
| (2) |
ここで![]() はロータの回転数である.また推力係数
はロータの回転数である.また推力係数![]() ,パワー係数
,パワー係数![]() は式(3),(4)で与えられる.
は式(3),(4)で与えられる.
| (3) | |
| (4) |
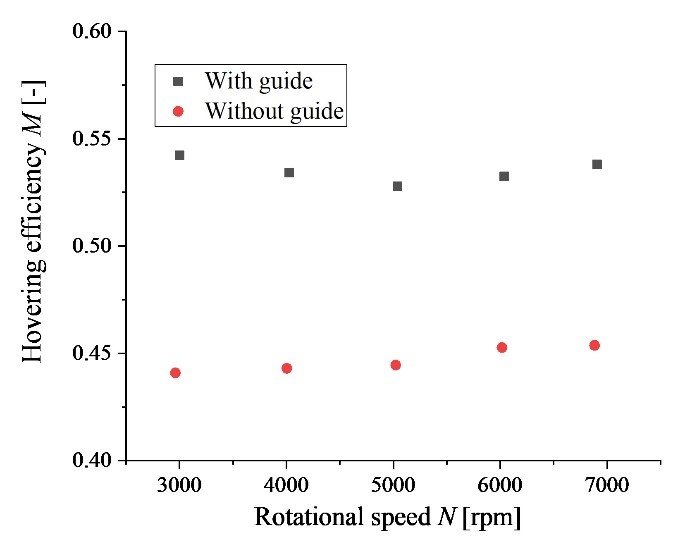
ここで,![]() は空気密度,R [m]は翼半径,A [m2]は回転面の面積をそれぞれ表す.これらを用いてfigure of meritとも呼ばれるホバリング効率M [-]は式(5)で定義される(5), (6).
は空気密度,R [m]は翼半径,A [m2]は回転面の面積をそれぞれ表す.これらを用いてfigure of meritとも呼ばれるホバリング効率M [-]は式(5)で定義される(5), (6).
 |
(5) |
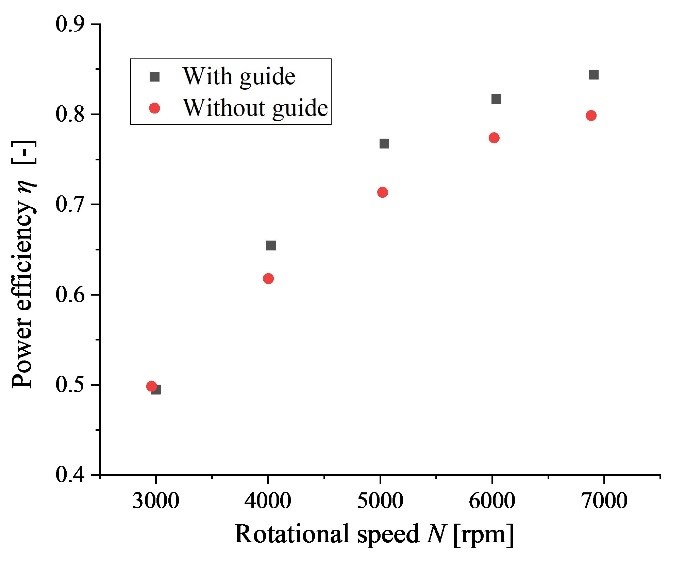
なお一般的なヘリコプタでMは0.5~0.7程度である.図5に各回転数におけるロータ出力効率及びホバリング効率の算出結果を示す.図5(a)より,ロータ出力効率は3000 rpmではあまり差は見られないが,4000 rpm以上の結果は明らかにガイドの付与により高い値になっていることが分かる.また図5(b)のホバリング効率で見ると,全ての回転数においてガイド付与により約0.1上昇していることが見て取れる.よって,本ガイドは推力増加だけでなく効率の面でも有益な効果を発揮することが言える.
 |
 |
| (a) Power efficiency | (b) Hovering efficiency |
| Fig.5 Variation of power efficiency or hovering efficiency for rotational speed. | |
4.おわりに
提案した低コストで設計・製作可能なガイドの付与により,ロータ+ガイドの総推力が増加すること及び効率が上昇することが実証された.ここでは割愛したが,別途風洞を使った実験により,低速での上昇時・下降時においてもガイドによる推力増加は実証されている(7).
今回提示した結果ではガイドの自重は考慮していない.ただし,本ガイドは形状が維持できれば材質は問わないため,軽量素材でガイドを作製すれば十分なペイロード増加が期待できる.一方,ガイド実装時の騒音や制御系への影響等,実用化に際して検討すべき点は山積している.続報の発表の折にでも忌憚のないご意見・ご指摘を頂けると幸いである.
謝辞
本研究の一部は公益財団法人JKA「自転車等機械振興事業に関する補助事業」の助成(2021M-169)を受けた.また使用した計測器の一部は田中太先生(福井大学)からご提供いただいた.加えて本研究の遂行に際し,本研究室の多くの学生にご協力いただいた.ここに記して謝意を表する.
文献
| (1) | ㈱矢野経済研究所,プレスリリースNo.3525 産業用ドローン世界市場に関する調査を実施(2024年) <https://www.yano.co.jp/press-release/show/press_id/3525>, (参照日2024年10月1日) |
| (2) | Wikipedia, Ducted fan <https://en.wikipedia.org/wiki/Ducted_fan>, (参照日2024年10月1日) |
| (3) | 大屋裕二,風レンズ風車の開発と今後の展望,応用力学論文集,Vol.12,pp.3-11(2009). |
| (4) | 加瀬篤志,川口清司,嶋田 直哉,ロータ用ガイド、ロータおよび推進体,特許第7522427号(2024). |
| (5) | 河内啓二,ヘリコプタ工学の基礎と応用 第2回 ロータの空気力学,日本航空宇宙学会誌,Vol.47,No.550,pp.246-251. |
| (6) | Leishman, J. G., Principles of Helicopter Aerodynamics 2nd edition, Cambridge University Press (2016). |
| (7) | Kase, A., Teramoto, M., Uetabira, Y. and Izawa, S., Drone Rotor Performance with an Annular Guide during Ascent and Descent, Abstract of ASME-JSME-KSME Joint Fluids Engineering Conference (AJK FED) (2023), 3-08-1-03. |