

流れ 2024年11月号 目次
― 特集テーマ:2024年度年次大会 ―
| リンク一覧にもどる | |
風車研究における流れ計測
 |
鎌田 泰成 |
1. 緒言
風車空力研究では,様々な方法で流れの計測を行う.風力発電では,風からロータを用いて機械動力を取り出し,発電機を駆動して電力を供給する.風車ロータは,風力発電の入り口であり,ロータの空力性能は風車発電性能に大きく影響する.本稿では,大形風洞を用いた流れ計測について,報告する.風車空力研究における流れ計測は,速度,圧力を計測する.これらの計測では,研究対象の現象に応じた計測システムの構築を必要とする.三重大学工学部エネルギー環境工学研究室で実施した計測を例に手法を紹介する.
2. 風洞実験における計測
2・1 風洞装置
三重大学では,回流型大形風洞を用いた風車研究を行っている.Fig.1に風洞装置概要を示す(三重大学360°VRキャンパスツアー,工学部,風洞実験室).風洞装置は,400kWの可変速ファンで駆動され,測定部に一様な流れを作成できる.風洞測定部は,長さ4.5mの開放型であり,ノズルは,口径3.6mの円形である.最大風速は,30m/sである.風洞風速は,可変速駆動するインバータで設定され,ノズルに設置したピトー管で計測する.なお,気流温度,風洞実験室内の大気圧は,センサで計測される.本風洞は,測定部上部に位置決め装置を備え,測定部内の任意の位置にセンサ等を配置できる.

Fig. 1 Wind tunnel
風洞および位置決め装置の操作は,ネットワーク接続されたPCからPLC経由ですべての操作,各種記録データの取得が可能である.PLCは,フリーズなく動作し,長時間の連続計測,大形実験装置には適している.また,PLCに集積計測データは,FTPサーバで記録される.なお,記録データは,サンプリング周波数1kHzまで対応できるが,必要に応じ,平均化を行い記録されている.

Fig. 2 LDA measurement
2・2 翼近傍の速度計測
Fig.2は翼近傍の速度計測時の研究用風車を示す.研究用風車は,ロータ直径2.4mで,2kWのサーボモータで回転数制御される.翼面は,レーザの反射を抑えるため艶消し黒で塗装されている.風車周囲流れは翼面近傍の流れに大きく影響される.レーザードップラー流速計(LDA)は非接触で流れを計測できる特徴を持ち,翼近傍の流れ計測には最適である.LDAは2本のレーザを交差させ、干渉縞を通過する測定粒子の光強度信号の周波数から速度を得る.1組のレーザで1次元の成分が測定可能であり,複数色のレーザを用いて,複数の成分が計測できる.レーザ光は光ファイバ経由でプローブに送られ,プローブは位置決め装置により任意に配置できる.なお,光学系のアライメントは温度変化によりずれることがあるので,実験中は取得データを見ながら適宜調整している.翼近傍の速度計測では,レーザは半径外側より回転軸に向け水平に照射し、翼面近くにレーザ交点を配置する.今回用いた2次元LDAプローブの焦点距は1.6mであり,レーザ交差角は3.97度である.翼負圧面で計測するとき,LDAプローブの速度成分は,水平面に対し±45°とし,上空より見ると2本のビームは重なり,風車翼に近い上流側のビームは回転面に平行に配置した.この配置により,翼によるビームの遮蔽を防ぎ,測定体積の翼面から高さ方向長さを最小化し,測定点の分解能を高めている.
翼面周囲流れを計測する場合、ロータの位置計測は重要である.LDAの信号処理機は,回転角度信号によりロータの回転角を取得できる.風車ロータは減速機を介してサーボモータに接続されている.当初,ロータ回転角信号は,サーボモータのエンコーダより取得していた.この場合,風車運転周速比によりブレード計測点が変化することトラブルがあった.ロータからサーボモータまでの動力伝達における剛性の問題でありロータハブに直接接続された光学センサに切り替えることで解消した.エンコーダ信号は高精度であるが,減速機と接手部分におけるたわみで位置精度が劣化していた.なおブレード、タワー等のたわみも計測点の精度に影響すると考えられるが,あらかじめレーザ変位計を用いて空力荷重作用時に翼面のパスを計測し,翼面通過の再現性を確認し,補正した。
2・3 翼面の圧力計測
Fig.3は翼面圧力測定用の研究用風車を示す.圧力センサは,風車ハブ部分に設置され,ロータの回転角信号を含めて測定される.なお,圧力センサは,差圧型であり,基準圧はハブ中央に設置した箱に接続されている.翼面の圧力測定孔は,圧力導管およびチューブを介してセンサに接続されている.センサ取得圧力は,圧力導管内の流体に作用する遠心力を補正して,翼面圧力とする.なお,測定断面はスパン方向に4断面で,圧力導管には測定断面ごとに圧力測定孔が設けてある.圧力センサは共通であり,測定断面の切り替えは,測定対象でない断面の測定孔をセロテープでふさいだ.測定孔の直径は0.4mmで,翼面に垂直に設けられている.翼面圧力分布計測において,測定孔の配置は非常に重要である.測定孔は,圧力変化の大きい前縁付近で密になるように配置されている.測定孔上流の流れは,圧力計測に影響すると考えられる.このため,翼面測定孔は流れ方向に重ならない配置になることが望ましい.また,遠心力による圧力補正時,圧力測定孔の配置は同一半径とすることが望ましい.さらに,水平軸風車翼は,翼スパン方向に最適なねじり角および翼弦長を持つ,3次元翼である.このため,翼スパン位置の違いは,翼弦長の変化,ねじり角の変化を引き起こし、計測した圧力分布が異なる断面形状や迎角により生じることになる.これらの条件を勘案し,翼スパンに直交方向に配置した.なお,風車を通過する流れは,風車によるエネルギー抽出による拡大流れとなる.このため,風車翼面における流れも,翼弦方向ではなく僅かに半径外側方向に傾斜すると考えた.
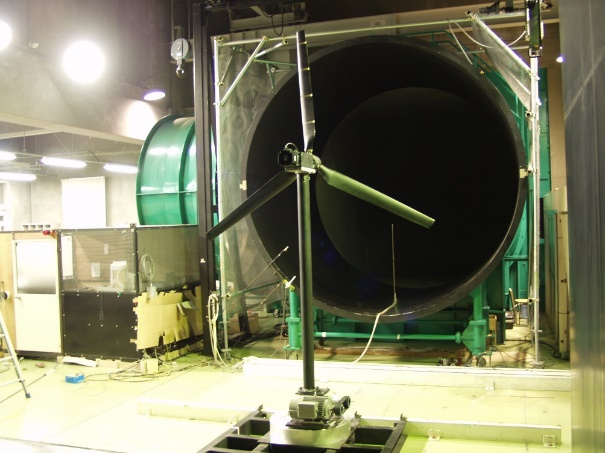
Fig. 3 Test wind turbine
圧力センサは,専用PCを備えており,外部PCからネットワークを通じて操作できる.圧力センサは、計測圧力、応答性を選択できる.本研究では,ロータ一回転中のヨー流れも対象とするので回転数600rpmに応答できるセンサを選択した.なお,圧力計測における応答性は,センサの性能はもちろんのこと,圧力導管にも影響されるので,動的応答は動的圧力振幅を用いて検定する.なお圧力配管の動特性は,翼面の圧力測定部を密閉容器で囲い,圧力振幅を加えて,容器内の圧力と圧力導管を経由した翼面圧力の双方を同時計測した.圧力の振幅は,振幅比および時間遅れを評価した.周波数の増加にしたがい,圧力振幅比は低下し,位相遅れは大きくなった.なお本実験における圧力はロータ回転角により変化するが,振幅は小さく,圧力計測値の大きさに対する補正は行わず,時間遅れのみを補正した.
2・4 計測例
Fig.4およびFig.5には,最適周速比λ=5.2で運転される水平軸風車翼の計測例を示す.計測半径はr/R=0.3である.Fig.4は白で翼断面の概形を示し,矢印は翼面に対する相対速度ベクトルを示す.ベクトルの色は,計測断面のスカラ速度を示す.速度計測点は,軸方向(主流方向)に移動させ,速度ベクトル起点を結ぶ右下がりの直線に対応する.各計測点で取得された速度は,アジマス角BINで平均化し,翼面に対する回転角位置を起点とするベクトルで示されている.翼負圧面の流れは,翼面に沿って流れている.翼の前縁付近で,流れは大きな速度を示し,揚力を発生していると推測できる.また翼面の極近傍の流れは遅く,また翼後縁付近の負圧面から下流方向へ遅い速度が観察できる.これは,翼面境界層が翼面からはがれ,下流へ流出している様子を捉えたものといえる.なお,翼面境界層は,翼面に付着した速度の遅い流れであり,LDA計測時に必要な測定粒子はこの流れの中に入りにくい.よって,計測データ数は境界層外の部分に比べ大幅に小さくなる.境界層内の速度データの把握は,相当な時間および十分な粒子供給を必要とする.
Fig.5はFig.4と同条件での翼面圧力分布を示す.Fig.は縦軸に圧力係数,横軸に翼弦方向位置を示す.翼面圧力は翼前縁付近に大きな負圧を発生しており,速度ベクトルから判別できる付着流れの圧力分布を示す.翼の圧力分布は前縁付近で急な変化を示し、後縁付近でなだらかに変化する.圧力測定結果よりおおむね翼面の圧力分布をとらえていると考えられる.流れの詳細は参考文献[1-3]に記載されている.
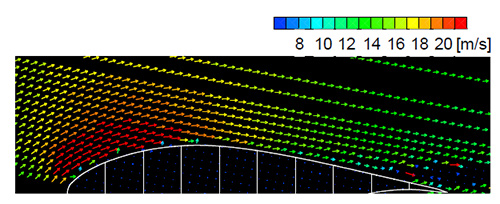
Fig. 4 Velocity distribution around rotating blade
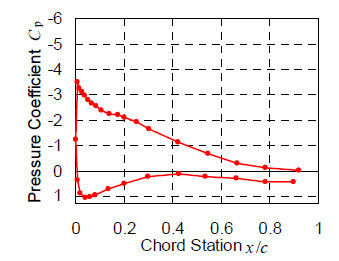
Fig. 5 Pressure distribution
おわりに
風車研究における流れ計測についていくつかの計測例を説明した.実験的研究は,計測対象となる現象をとらえる様々な測定機器を利用可能である.これらの特性を十分に把握し,最適な構成を選択することが,計測を成功させるうえで重要である.