

流れ 2015年2月号 目次
― 特集テーマ:流体工学部門講演会 ―
| リンク一覧にもどる | |
デコンボリューションを用いたディジタルホログラフィ粒子計測とその応用
淺井 裕斗
|



1.緒言
第92期機械学会流体工学部門講演会にて口頭発表をし,光栄にも若手優秀講演フェロー賞を頂きました.講演会を運営して下さった方々に御礼を申し上げるともに,研究内容について紹介させていただきます.
粒子計測は気泡・液滴計測も含め様々な工学分野で利用されており,流体工学ではPIV・PTV計測も粒子計測の上で成り立っている技術といえる.
これらの流れ場解析手法は可視化トレーサー粒子を記録した時系列画像を用いるため,通常は2次元空間分布の解析となるが,実際の流動現象は3次元運動であるため,その解析には3次元空間情報を記録する手法が必要となる.
こうした3次元空間情報を記録する方法が様々に提案されてきたが,その中にディジタルホログラフィがある.これは,単眼観測法であり,ホログラムパターンをCCDなどの撮像素子で画像として記録するため,3次元の動的現象も記録することができ,さらに計算機上での解析が可能となる.そのため,ディジタルホログラフィを粒子計測に応用すると,カメラ1台で3次元流動計測が可能となる.
本研究では,ディジタルホログラフィ粒子計測において測定精度低下の主原因となる粒子像伸長を抑制するため,デコンボリューション(1)(2)による後処理を試みた.
そして,デコンボリューションを用いたディジタルホログラフィ粒子計測をPIV計測に利用した数値解析を行い,伸びの低減効果が粒子運動の計測精度に与える影響を定量評価した.
2.計測原理
2-1 ディジタルホログラフィ
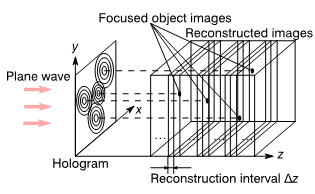
ディジタルホログラフィは単眼観測による3次元物体の記録技術である.物体に平面波を照射すると,物体光と参照光が干渉することで,その干渉縞がホログラムパターンとして記録される.記録されたホログラムパターンhdは式(1)のフレネル回折式により再生像情報を持つ複素振幅hを計算することができる.jは虚数単位,λは波長,(xz, yz, z)は奥行き位置zにおける3次元空間座標を表す.再生情報は,画像データとして出力して積層することで,図1に示すような任意の3次元空間を再生できる.
 |
(1) |
 |
 |
| Fig. 1 Principle of digital holography | |
2-2 デコンボリューション
ディジタルホログラフィにおける再生像の伸びを低減するために,画像処理で用いられるデコンボリューションを3次元再生像に対して適用する.この手法では,粒子像の伸びをもつ再生像は,粒子位置と粒子像の伸びを表す点拡がり関数(Point spread function: PSF)の畳み込み積分であると考え,再生像と粒子像の伸びを用いて粒子位置を算出する.3次元空間(xz, yz, z)における再生像データをh, 粒子分布データをf, PSFをgとすると,デコンボリューションの基本式は式(2)のように表される.ただし,βは十分小さい複素数であり,F[ ]はフーリエ変換演算子を表す.なお,PSFは数値計算により作成した粒子再生像に基づいたものを用いている.
 |
(2) |
式(2)右辺の分母F[g(xz, yz, z)]+ βの振幅成分が0に近い場合,演算結果が発散することによるノイズが顕著となる.この除算による発散問題を解決するために,本研究では振幅の正規化をする.正規化したデコンボリューションにより算出される粒子分布データをf’としたとき,構成式は次式のようになる.
 |
(3) |
3.数値シミュレーション
数値シミュレーションでは図2に示すような壁面上部に速度U=500 mm/sを与えた立方体キャビティ流れの一部分を用いる.レイノルズ数はRe=1000,立方体の代表長さは2 mm,動粘性係数はν=1.0 mm2/sである.立方体の領域内に粒子をランダムに配置し,2時刻のホログラムを作成する.ホログラムサイズは256×256 pixel, 画素サイズは2 μm,粒径は10 μm,時間刻みはΔt=0.4 ms とした.2時刻のホログラムから再生像を作成し,デコンボリューションの有無による変位ベクトルで精度評価をする. デコンボリューションの有無により粒子再生像を比較した投影図を図3に示す.黒色部分が背景,白色部分が粒子を表しており,粒子数は150 #である.(a)のデコンボリューション無しの結果に対して,(b)のデコンボリューション有りの結果のほうが,奥行き位置を識別しやすくなることが確認できる.
図4に変位ベクトルのz-y投影図を示す.(a)は真値分布,(b)はデコンボリューション無しの結果,(c)はデコンボリューション結果から求めた変位ベクトルである.粒子位置は重心位置で検出し,変位ベクトルを算出する際に,粒子追跡法による誤差を取り除くために,真値と近い粒子で対応付けた.(b)と比較して,(c)はベクトルのばらつきが少ないことが確認できる.この結果を定量的に評価するために,検出された変位ベクトルの各成分のRMS誤差を図5にまとめる.なお,ベクトルの検出率はデコンボリューション無しの場合では94.0 %,デコンボリューション有りの場合では97.3 %である.図5より,デコンボリューション無しの場合と比べてデコンボリューション有りの場合のほうがz方向のRMS誤差が小さくなることがわかる.
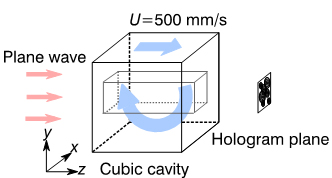
Fig. 2 Cavity flow model
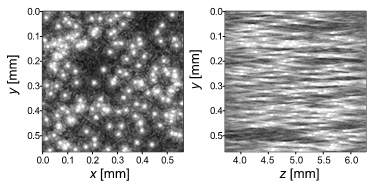
(a)Without deconvolution
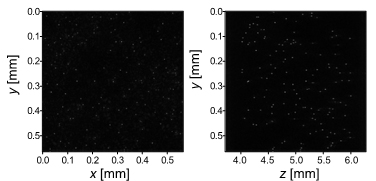
(b)With deconvolution
Fig. 3 Projections of reconstruction images
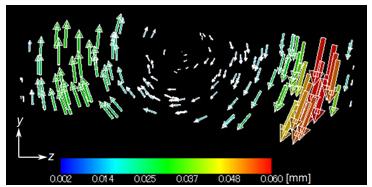
(a)True vector
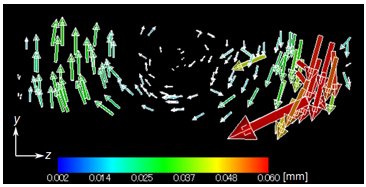
(b)Without deconvolution
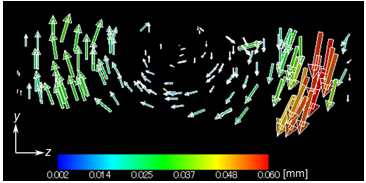
(c)With deconvolution
Fig. 4 Comparison of displacement vectors
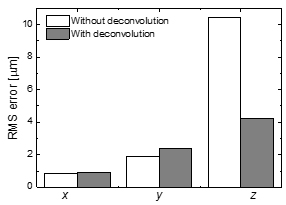
Fig. 5 RMS error of displacement in each direction
4.結言
デコンボリューションを用いた粒子計測を流動計測に応用し,数値シミュレーションにより性能評価をした.立方体キャビティ流れの数値解を用いて2時刻間の粒子変位ベクトルを算出すると,デコンボリューションを施したほうが,ベクトルのばらつきが小さく,また奥行き方向のRMS誤差が低減されることから,本計測手法が3次元流動計測に有用であることを示した.
謝辞
当日の講演会にて,有意義な議論を通して貴重なご意見を頂きました.
本研究を評価してくださった皆様ならびに本ニュースレター執筆の機会を与えてくださった皆様に深く感謝いたします.
引用文献